48 KiB
简介
AT command(V2) 是一款管理AT命令通信交互的组件, 适用于Modem、WIFI、蓝牙等使用AT命令或者ASCII命令行通信的场景,它涵盖了大部分AT通信形式,如参数设置、查询、二进制数据发送等,同时也支持自定义命令交互管理,由于它的每个命令请求都是异步的,所以对于无操作系统的环境也支持。相对于V1版本,新版本在命令接收匹配、URC不定长度数据捕获以及内存安全上做了大量优化,让它可以应对更多复杂的应用。
下面是一个最基本使用的演示:
/**
* @brief 命令响应处理程序
*/
static void read_csq_callback(at_response_t *r)
{
int rssi, ber;
//+CSQ: <rssi>,<ber>
if (r->code == AT_RESP_OK) {
//命令响应成功后,解析出rssi,ber.
if (sscanf(r->prefix, "+CSQ:%d,%d", &rssi, &ber) == 2) {
printf("rssi:%d, ber:%d\r\n", rssi, ber);
}
} else {
printf("'CSQ' command response failed!\r\n");
}
}
/**
* @brief 读CSQ值请求
*/
static void read_csq(void)
{
//发送CSQ查询命令,超时时间为1000ms,重发次数为0
at_send_singlline(at_obj, read_csq_callback, 1000, 0, "AT+CSQ");
}
上面的示例展示了AT命令通信的基本使用方式:
- 命令请求:执行命令发送之后,命令并不会立即从数据通道发送出去,而是先进入命令队列。
- 异步通知:无论命令执行成功与否,都会以异步方式通知请求者。
框架介绍
整个组件由两部分内容组成:
- AT 作业管理, 管理所有AT异步请求及命令收发工作。
- URC(主动上报) 处理模块,实时捕获URC消息并上报事件,它跟AT作业是并行的,是一个可选的模块。
AT 作业
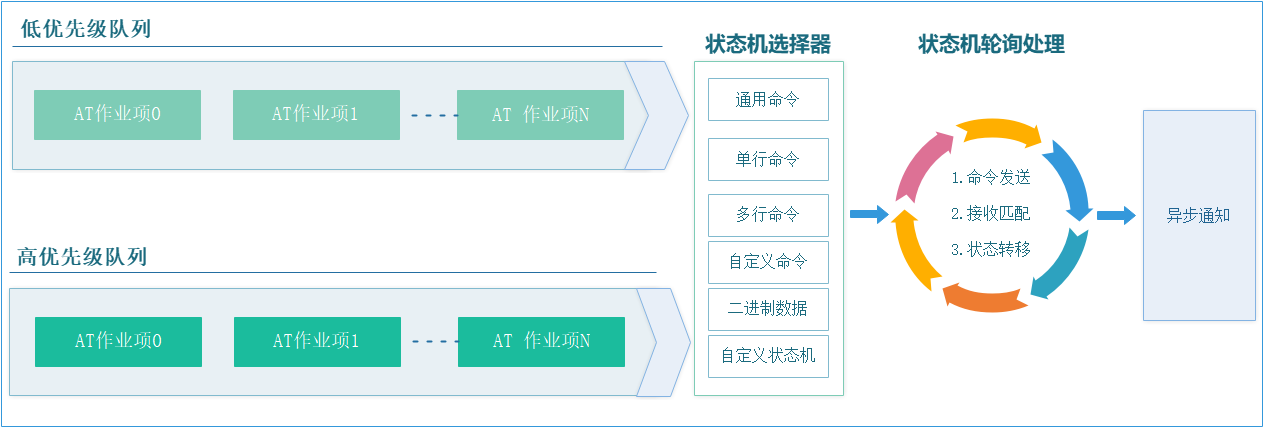
'AT Command'整个组件基本处理单元是AT作业, 它实际上是一个有限状态机,不仅仅可以处理单个命令收发,还可以是批量命令,自定义命令等,应用程序在进行AT通信请求时,系统会根据请求类型生成一个新的作业对象,然后将对象按照执行优先级预先缓存到队列中,接着系统会从队列逐个取出并选择相应的状态机处理程序进行处理,处理完毕之后再以回调方式将结果上报给应用程序,整个环节跟流水作业生产产品一样,它的基本处理流程图如下所示:
AT作业生命周期
AT作业生命周期可以简单分为五个阶段:创建阶段、就绪阶段、运行阶段、完成/终止阶段、销毁阶段。
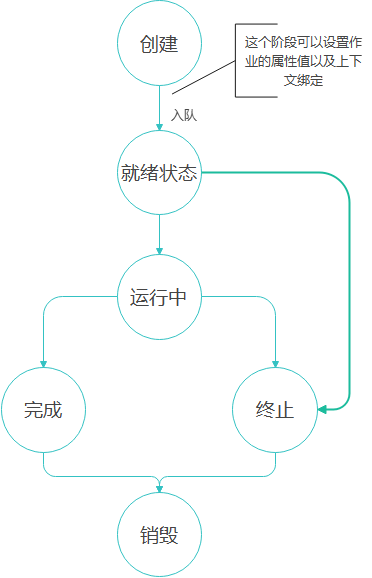
- 创建阶段: 根据请求类型生成作业项,这个阶段可以为新作业项绑定一个上下文,用来监视作业的整个工作过程,包含运行状态,AT命令响应信息等.
- 就绪阶段: 作业被提交入队列之后就进入了就绪状态,系统按队列顺序一个接着一个取出来并运行.
- 运行阶段: 此时进入运行一个状态机,以一般AT命令为例,它包含了命令发送,数据接收匹配,超时重试等处理.
- 完成/终止阶段: 当命令请求的响应信息匹配成功之后,则进入完成状态,如果在这之前命令请求被提示终止,则进入终止状态。
- 销毁阶段: 在这个阶段系统会将作业从队列中移出同时将相关内存释放.
URC 处理模块
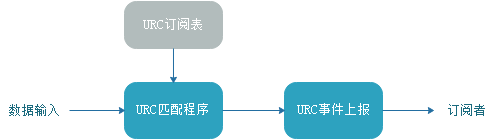
URC 处理模块可以实时解析URC消息,上层应用需要提供URC消息的匹配规则(消息前后缀)及事件处理入口,它们共同组成了URC订阅表,一旦URC解析器匹配到表中某项规则时,立即以事件方式返回给订阅者进行处理(有关这部分的使用可以参考URC订阅)。
快速上手
有了对整个框架的基本认识之后,接下来我们看一下如何在你的平台下使用。
准备工作
在使用前,您需要做一些准备工作,包括:
- 工程配置与移植
- 驱动接口适配
- 创建AT通信对象
- 加入轮询任务
工程配置与移植
如下所示,使用前您需要先将AT通信组件添加到你的项目中, 涉及的文件只有inlcude及src这两个目录,另外根据你所有平台不同,还需要进行简单的移植配置才能正常使用,有关这部分可以参考平台移植指南平台移植及配置.
at_chat
│
|───docs 使用文档
|───samples 演示案例
|───inlcude 头文件目录
| │───at_chat.h
| │───at_port.h
| │───linux_list.h
└───src
│───at_port.c
│───at_chat.c
驱动接口适配
完成平台移植这些工作之后,为了能够使AT通信对象与硬件关联起来,你需要提供相关的驱动接口进行适配对接,包括:
- 串口读写接口
因为通常使用是串口进行AT通信,所以只需要提供串口中读写驱动接口即可,不过这里需要注意的是,串口驱动接口必须是带缓冲区非阻塞的,对于LINUX的平台,需要将串口文件IO设置为O_NONBLOCK;而如果你使用的是MCU,可以使用队列或者环形缓存区实现(死等收发不保证能正常工作),有经验的工程师对这个应该已经比较熟悉了,对于刚入门不久的小伙,可以参考‘samples/none_os’中的例子。
- 互斥锁接口
如果你是在OS环境下使用并且跨线程执行了AT请求,你需要提供上锁/解锁接口,如果你都是在单线程中运行的则直接填NULL即可。
- 缓冲区大小设置
包括接收缓冲与URC缓冲区,接收缓冲区用于缓存命令请求时设备端响应的数据,它取决于你的设备最大响应内容长度;URC缓冲区也是取决于最长上报的URC数据长度。
- 日志打印与异常接口
如果你需要查看所有AT命令通信的细节,你需要实现debug接口,在进行AT命令通信过程中,他会将所有收发消息输出出来,如果执行过中出现异常(出错,超时),则可以通过实现error接口来进行监视。
完整的适配器定义如下:
/**
* @brief AT interface adapter
*/
typedef struct {
//Lock, used in OS environment, fill in NULL if not required.
void (*lock)(void);
//Unlock, used in OS environment, fill in NULL if not required.
void (*unlock)(void);
//Data write operation (non-blocking)
unsigned int (*write)(const void *buf, unsigned int len);
//Data read operation (non-blocking)
unsigned int (*read)(void *buf, unsigned int len);
//AT error event ( if not required, fill in NULL)
void (*error)(at_response_t *);
//Log output interface, which can print the complete AT interaction process, fill in NULL if not required.
void (*debug)(const char *fmt, ...);
#if AT_URC_WARCH_EN
//URC buffer size, set according to the actual maximum URC frame when used.
unsigned short urc_bufsize;
#endif
//Command response receiving buffer size, set according to the actual maximum command response length
unsigned short recv_bufsize;
} at_adapter_t;
示例:
/**
* @brief AT适配器
*/
static const at_adapter_t at_adapter = {
.lock = at_mutex_lock, //多任务上锁(非OS下填NULL)
.unlock = at_mutex_unlock, //多任务解锁(非OS下填NULL)
.write = at_device_write, //数据写接口
.read = at_device_read, //数据读接口)
.debug = at_debug, //调试打印接口
.recv_bufsize = 256, //接收缓冲区大小
.urc_bufsize = 512
};
创建AT通信对象
下一步就是使用刚刚创建好的驱动接口来创建AT通信对象。
原型如下:
at_obj_t *at_obj_create(const at_adapter_t *);
!> 这里有一点需要特别注意,为了节省内存使用,AT组件只存储了'at_adapter_t'对象的指针,而不是对象本身,所以'at_adapter_t'定义的对象必须是常驻内存的,建议使用const进行修饰,这样可以存储在ROM中,减少内存使用。
示例:
at_obj_t *at_obj;
//....
at_obj = at_obj_create(&at_adapter);
if (at_obj == NULL) {
printf("at object create failed\r\n");
}
//...
加入轮询任务
最后,你需要再提供一个任务定时轮询,以便它能够及时处理AT请求以及URC消息,轮询时间越短越好,原型如下:
/**
* @brief AT轮询处理程序
*/
void at_obj_process(at_obj_t *at);
示例:
/**
* @brief AT轮询程序
*/
void at_device_process(void)
{
static unsigned int timer = 0;
//(为了加快AT命令处理响应速度,建议5ms以内轮询一次)
if (at_get_ms() - timer > 5) {
timer = at_get_ms();
at_obj_process(&at_obj);
}
}
基础应用
完成上面几个步骤之后,你就可以使用AT命令请求相关接口了,不过在开始使用之前,我先带你了解一下有关一般AT命令格式和使用过程中涉及到的一些基本概念,了解这些有助深入理解整个AT组件是如何针对各种不同场景处理那些业务交互的实现原理。
一般AT命令类型与处理
以常见的GPRS/WIFI模组AT命令为例,它们常用格式的可分以下几种类型:
-
测试命令 命令格式为AT+<x>=?,用于查询设置命令设置的参数以及其取值范围。
-
查询命令 命令格式为AT+<x>?,用于返回参数的当前值。
-
设置命令 命令格式为AT+<x>=<...>,用于设置用户配置参数。
-
执行命令 命令格式为AT+<x>,不带参数,常用于执行系统相关操作,如查询系统信息,读取IMEI号等。
上面列举的4种格式基本上覆盖了常见AT通信场景,通信双方都是一问一答式的,主机发送1行命令请求,从机响应数据及状态,双方只交互一次。由于流程结构一样,所以在软件设计时比较容易统一设计成一种类型接口。
主机:
=> AT+XXX...
从机:
<= +XXX
<= OK/ERROR
对主机端来说,命令都是以行为单位执行的,只是携带的参数类型或者个数不同,唯一需要特殊处理的是数据响应信息解析,因为各个命令响应并没有统一格式,所以无法在底层实现一个通用解析模块,这需要上层应用根据不同的命令类型进行分别处理。我们可以按照谁发的命令谁来处理的原则,将命令响应内容返还给命令发送者,由它来进行处理。但是在此之前,需要鉴别响应内容从哪开始到哪结束,这就涉及到内容匹配提取的问题,归纳起来如有下两种情况:
- 对于设置类命令,命令响应全是以"OK"状态返回。
- 对于查询类命令,返回的内容包含数据+状态,命令状态也是以"OK"返回,而数据部分对于不同命令有不一样的信息格式。
由此可以通过统一为匹配"前缀+后缀"的方式提取到AT命令响应的内容,这也是这个组件处理AT命令请求的基本实现原理,它通过可以为每个命令附带一个属性信息(包含响应前缀,响应后缀)用于告诉AT解析器如何正确提取响应的内容。
以无线模组查询信号质量命令为例,如下图所示,"+CSQ:"作为响应内容前缀,"OK"作为响应内容后缀。

命令属性
AT命令属性使用at_attr_t描述,在发送AT请求之前,你可以为每个AT请求设置一个属性,它可以控制AT状态机的行为,如控制命令响应内容匹配规则、超时时间、错误重试等。所有AT作业对象都共享以下属性:
- 用户私有参数(params)
- 响应内容前后缀(prefix,suffix)
- 回调处理程序(cb)
- 响应超时时间(timeout)
- 重次次数(retry)
- 优先级(priority)
AT属性数据结构定义如下:
/**
*@brief AT Command attributes.
*/
typedef struct {
void *params; /* User parameter, fill in NULL if not required. */
const char *prefix; /* Response prefix, fill in NULL if not required. */
const char *suffix; /* Response suffix, fill in NULL if not required. */
at_callback_t cb; /* Response callback handler, fill in NULL if not needed. */
unsigned short timeout; /* Response timeout(ms). */
unsigned char retry; /* Response error retries. */
at_cmd_priority priority; /* Command execution priority. */
} at_attr_t;
在使用AT属性之前,你需要为它的每个字段都进行初始化设置,但每次发送请求都将所有属性设置一遍太过繁琐,大多数情况下命令的属性都差不多,您可以先使用at_attr_deinit进行默认设置,然后再设置关注的属性即可。
示例1:
at_attr_t attr;
//设置属性为默认值
at_attr_deinit(&attr);
attr.cb = my_handler; //设置回调处理程序
示例2:
at_attr_t attr;
//设置属性为默认值
at_attr_deinit(&attr);
attr.cb = my_handler; //设置回调处理程序
attr.prefix = "+CSQ:" //设置响应内容前缀
attr.suffix = "OK"; //设置响应内容后缀
...
AT回调与响应
对于是异步的命令,所有请求的结果都是通过回调方式通知应用程序的,同时它会返回命令响应的相关信息,你可以在AT属性中指定相应的回调处理程序。
回调程序原型如下:
/**
*@brief AT 执行回调
*@param r AT响应信息(包含执行结果,设备端返回的内容信息)
*/
typedef void (*at_callback_t)(at_response_t *r);
其中at_response_t包含了所有请求响应相关的信息,它包含了请求命令的执行状态和命令响应内容。
/**
* @brief AT响应信息
*/
typedef struct {
struct at_obj *obj; /* 所属AT通信对象*/
void *params; /* 附属参数*/
at_resp_code code; /* AT命令响应码*/
unsigned short recvcnt; /* 接收数据长度*/
char *recvbuf; /* 接收缓冲区(原始数据)*/
/* 接收内容前缀,当code=AT_RESP_OK时有效,如果未指定匹配前缀则它指向recvbuf*/
char *prefix;
/* 接收内容后缀,当code=AT_RESP_OK时有效,如果未指定匹配后缀则它指向recvbuf*/
char *suffix;
} at_response_t;
- obj:所属AT通信对象,你可以通过它在响应处理程序中根据状态发送下一个请求。
- param:附属参数,对应
at_attr_t中的params。 - code:AT命令响应码
- recvcnt:指示了接收缓冲区recvbuf有效接收数据长度。
- recvbuf:缓存了此次命令请求时返回的数据。
- prefix:接收内容前缀,例如当你期望接收到'+CSQ:'开始的数据时,当code==AT_RESP_OK,则prefix就是指向了'recvbuf'中'+CSQ:'的开始位置。
- suffix:接收内容后缀。
了解完上面的几个基本概念之后,下面看一下如何使用。
单行命令发送(at_send_singlline)
通过at_send_singlline函数可以执行单行命令请求,其原型如下:
/**
* @brief Send a single -line command
* @param cb Response callback handler, Fill in NULL if not required
* @param timeout command execution timeout(ms)
* @param retry command retries( >= 0)
* @param singlline command
* @retval Indicates whether the asynchronous work was enqueued successfully.
* @note Only the address is saved, so the 'singlline' can not be a local variable which will be destroyed.
*/
bool at_send_singlline(at_obj_t *at, at_callback_t cb, int timeout, int retry, const char *singlline);
返回值: 当请求成功返回true,否则返回false。
参数说明:
- at : AT对象
- cb : 回调处理程序,当命令执行完成之后,将以这个接口通知上层应用,并携带命令响应内容及状态。
- timeout:命令执行超时时间,单位为ms。
- retry:命令出错或者超时重试次数。
- singlline:命令名称。
注:AT作业只会缓存singlline的指针,这意味者它指向的命令不能是局部数据。
示例1,查询网络注册状态(SIM900模块):
命令格式:
=> AT+CREG?
<= +CREG:<mode>,<stat>[,< lac>,< ci>]
<= OK
代码实现:
/**
* @brief 命令响应处理程序
*/
static void read_creg_callback(at_response_t *r)
{
int mode, state;
if (r->code == AT_RESP_OK) {
//提取出工作模式及注册状态
if (sscanf(r->prefix, "+CREG:%d,%d", &mode, &state) == 2) {
printf("Mode:%d, state:%d\r\n", mode, state);
}
} else {
printf("'CREG' command response failed!\r\n");
}
}
/**
* @brief 读网络注册状态
*/
static void read_creg(void)
{
//发送CREG查询命令,超时时间为1000ms,重发次数为0
at_send_singlline(at_obj, read_creg_callback, 500, 1, "AT+CREG?");
}
示例2,IO控制:
如果你不关心命令响应结果,直接可以这样使用。
at_send_singlline(at_obj, NULL, 500, 0, "AT+SETIO=1,FF"); //设置设备IO类型
at_send_singlline(at_obj, NULL, 500, 0, "AT+OUTIO=1,55"); //设置IO电平
多行命令发送(at_send_multiline)
实际工程应用中,特别是进行设备初始化配置时,往往一次需要发送大量命令,一种实现方式是通过at_send_singlline在每个命令的回调中根据命令状态进行下一条命令的请求,命令较少时还可以接受,命令一多就会形成恐怖的回调地狱链,造成代码难以理解和维护,现实中应尽量避免这种写法。这里提供了一个支持批量发送的接口来应对这种情况,其原型如下:
/**
* @brief Send multiline commands
* @param attr AT attributes(NULL to use the default value)
* @param multiline Command table, with the last item ending in NULL.
* @example :
* const char *multiline = {
* "AT+XXX",
* "AT+XXX",
* NULL
* };
* at_send_multiline(at_dev, NULL, multiline);
*
* @retval Indicates whether the asynchronous work was enqueued successfully.
* @note Only the address is saved, so the array can not be a local variable which will be destroyed.
*/
bool at_send_multiline(at_obj_t *at, const at_attr_t *attr, const char **multiline);
返回值: 当请求成功返回true,否则返回false。
参数说明:
- at : AT对象
- attr : 命令属性,通过它可以设置命令回调程序,超时时间等。
- multiline:命令表,以NULL结尾。
示例(SIM800C 模组初始化):
/**
* @brief 命令响应处理程序
*/
static void simcom_init_callback(at_response_t *r)
{
printf("SIM800C Init %s!\r\n",r->code == AT_RESP_OK ? "ok" : "error");
}
/*
* @brief 模块初始化
*/
static void simcom_init(void)
{
at_attr_t attr;
static const char *cmds[] = {
"AT+CSCLK=0",
"AT+CIPHEAD=1", //+RECEIVE,<n>,<data length>:
"AT+CIPQSEND=1", //快发模式
"AT+CIPMUX=1", //多IP支持
"AT+CIPSPRT=>",
"AT+CIPSRIP=0",
NULL
};
at_attr_deinit(&attr);
attr.cb = simcom_init_callback; //设置命令回调
at_send_multiline(at_obj, &attr, cmds);
}
!> 批量命令表中最后一项必须是NULL,且整个命令表不能是局部变量。
可变参数命令(at_exec_cmd)
前面讲的单行命令与多行命令都是用于发送固定参数的命令的,如果你的命令参数(如设置类命令)是可变的,可以通过 at_exec_cmd执行请求,其原型如下:
/**
* @brief Execute one command
* @param attr AT attributes(NULL to use the default value)
* @param cmd Formatted arguments
* @param ... Variable argument list (same usage as printf)
* @retval Indicates whether the asynchronous work was enqueued successfully
*/
bool at_exec_cmd(at_obj_t *at, const at_attr_t *attr, const char *cmd, ...);
返回值: 当请求成功返回true,否则返回false。
参数说明:
- at : AT对象
- attr : 命令属性,通过它可以设置命令回调程序,超时时间等。
- cmd : 格式化命令,用法与printf一样。
示例1,EC20设置APN:
/**
* @brief 命令响应处理程序
*/
static void set_apn_callback(at_response_t *r)
{
printf("Setting APN %s!\r\n",r->code == AT_RESP_OK ? "ok" : "error");
}
/**
* @brief 设置APN
*/
static bool set_apn(const char *apn, const char *username, const char *pwd)
{
at_attr_t attr;
at_attr_deinit(&attr);
attr.cb = set_apn_callback; //设置命令回调
at_exec_cmd(at_obj, &attr, "AT+QICSGP=1,1,\"%s\",\"%s\",\"%s\",0", apn, username, pwd);
}
可变参数列表(at_exec_vcmd)
通常at_obj_t对象并不会直接公开给第第三方模块使用,为了能够使其它模块也能进行AT请求,你可能需要对命令请求的接口进行2次封装,当需要支持可变参数时,可以使用at_exec_vcmd,它支持传递变参列表,其原型如下:
/**
* @brief execute command (with variable argument list)
* @param attr AT attributes(NULL to use the default value)
* @param cmd Format the command.
* @param va Variable parameter list
* @return Indicates whether the asynchronous work was enqueued successfully
*/
bool at_exec_vcmd(at_obj_t *at, const at_attr_t *attr, const char *cmd, va_list va);
返回值: 当请求成功返回true,否则返回false。
参数说明:
- at : AT对象
- attr : 命令属性,通过它可以设置命令回调程序,超时时间等。
- cmd : 格式化命令
- va : 参数列表
示例:
/**
* @brief 发送AT命令
* @param attr 命令属性
* @param cmd,.. 格式化命令参数,用法与printf一样
*/
bool at_send_cmd(const at_attr_t *attr, const char *cmd, ...)
{
bool ret;
va_list args;
va_start(args, cmd);
ret = at_exec_vcmd(at_obj, attr, cmd, args);
va_end(args);
return ret;
}
发送原始数据(at_send_data)
当命令类型非纯文本或者格式化的命令无法满足要求时,可以使用at_send_data接口,以原始数据的方式发送。
/**
* @brief Send (binary) data
* @param attr AT attributes(NULL to use the default value)
* @param databuf Binary data
* @param bufsize Binary data length
* @retval Indicates whether the asynchronous work was enqueued successfully
*/
bool at_send_data(at_obj_t *at, const at_attr_t *attr, const void *databuf, unsigned int bufsize);
返回值: 当请求成功返回true,否则返回false。
参数说明:
- at : AT对象
- attr : 命令属性,通过它可以设置命令回调程序,超时时间等。
- databuf : 原始数据
- bufsize : 数据长度
自定义命令(at_custom_cmd)
在进行变参命令或者原始数据发送时,系统会他们单独分配一块区域进行暂存,然后跟随AT作业一块缓存到队列中,如果短期需要发送大量的数据,或者命令队列不能及时被处理,那么那段时间内命令队列占用的总内存会激增,严重时导致无可用内存。即使在内存使用的上做限制,但是遇到这种情况也会造成命令请求失败,使用自定义命令的方式可以在一定程度缓解这个问题,它不直接缓存调用者的任何数据,而只暂存一个发送器指针,当真正发送命令时,再上调用者请求数据,其原型如下:
/**
* @brief Execute custom command
* @param attr AT attributes(NULL to use the default value)
* @param sender Command sending handler (such as sending any type of data through the env->obj->adap-write interface)
* @retval Indicates whether the asynchronous work was enqueued successfully
*/
bool at_custom_cmd(at_obj_t *at, const at_attr_t *attr, void (*sender)(at_env_t *env));
返回值: 当请求成功返回true,否则返回false。
参数说明:
- at : AT对象
- attr : 命令属性,通过它可以设置命令回调程序,超时时间等。
- sender : 数据发送器,调用者可以通过env->obj->write接口发送任何形式的数据。
示例:(ESP8266创建TCP socket)
/**
* @brief 命令响应处理程序
*/
static void create_socket_callback(at_response_t *r)
{
printf("Create socket %s!\r\n",r->code == AT_RESP_OK ? "ok" : "error");
}
/**
* @brief 发送创建socket命令
*/
void create_socket_sender(at_env_t *env)
{
socket_t *sock = (socket_t *)env->params;
env->println(env, "AT+CIPSTART=\"TCP\",\"%s\",%d", sock->ip, sock->port);
}
/**
* @brief 创建socket
*/
static bool create_socket(socket_t *sock)
{
at_attr_t attr;
at_attr_deinit(&attr);
attr.params = sock; //用户参数(里面存储了socket id,目标IP,端口)
attr.cb = create_socket_callback; //设置命令回调
attr.suffix = "CONNECT OK"; //设置响应后缀
return at_custom_cmd(at_obj, &attr, create_socket_sender);
}
高级教程
了解完一般命令处理之后,下面我们来讲一下一些特殊场景下的AT命令请求及其处理方式,以及了解处理这些请求涉及到的相关概念和接口,同时我也会详细说明有关URC消息处理办法和在OS上的应用。
本节导读如下:
- 组合命令处理
- 自定义AT作业
- URC消息处理
- 多实例并存
- AT作业上下文
- OS应用之异步转同步
- 内存监视器
组合命令处理
在一些场景下,主机与从机之前间需要通过组合命令来交换信息,即主机与从机间完成一次业务需要进行多次命令交互,例如sms收发,socket数据收发,不同模组产商命令可能是不一样的,下面是几个组合命令的例子。
发送短信流程(参考SIM900A模组):
主机 =>
AT+CMGS=<Phone numer> + \x1A //发送目标手机号+ctrl+z
从机 <=
'<' //从机回复提示符'<'
主机 =>
<sms message> //发送短信内容
从机 <=
OK //从机回复OK
发送Socket数据流程(参考移远EC21模组):
主机 =>
AT+QISEND=<connectID>,<send_length>
从机 <=
'<' //从机回复提示符'<'
主机 =>
<data> //发送二进制数据内容
\x1A //发送CTRL+z启动发送
从机 <=
OK //从机回复OK
发送TCP Socket数据流程(参考Sierra 模组):
主机 =>
AT+KTCPSND=<session>,<send_length>
从机 <=
'CONNECT' //从机回复提示符'CONNECT'
主机 =>
<data> //发送二进制数据内容
"--EOF--Pattern--"" //发送结束符
从机 <=
OK //从机回复OK
接收TCP Socket数据(参考Sierra 模组):
主机 =>
AT+KTCPRCV=<session_id>,<recv_length>
从机 <=
'CONNECT' //从机回复提示符'CONNECT'
<data> //二进制数据内容
"--EOF--Pattern--"" //结束符
OK //状态码
组合命令与一般AT命令最大的不同体现在命令交互的流程结构上,它们进行一次通信(数据)业务时需要交互2次或多次以上,所以软件设计需要考虑并发冲突的可能,因为在进行某项业务交互时如果需要进行两次AT命令请求才能完成,有可能在进行第一次时过程中就被其它命令穿插打断了,从而造成该项业务执行失败。
对于这个问题,除了利用OS的锁解决之外,还可以利用自定义作业来处理,它允许你在一个AT作业中进行多次命令交互,同时能够让应用层自行控制命令收发流程。
自定义AT作业
自定义AT作业使用at_work_t表示,它实际是一个状态机轮询程序,通过'at_env_t'参数提供了基本的状态变量,数据收发,超时管理等接口。除了能用来收发命令之外,你甚至可以用它来控制硬件IO,例如有时序控制要求开关机操作,这样做也有利于处理设备状态同步的问题。
原型定义如下:
/**
*@brief AT作业轮询处理程序
*@param env AT作业的公共运行环境,包括一些通用的变量和进行AT命令通信所需的相关接口。
*@return 作业处理状态, 它决定了是否在下一个循环中是否继续运行该作业。
* @arg true 指示当前作业已经处理完成,可以被中止,同时作业的状态码会被设置为AT_RESP_OK。
* @arg false 指示当前作业未处理完成,继续运行。
*@note 需要注意的是,如果在当前作业中执行了env->finish()操作,则作业立即终止运行。
*/
typedef int (*at_work_t)(at_env_t *env);
其中:
at_env_t 定义了一些通信上下文环境相关接口与公共状态变量,通过它你可以实现自己的通信交互逻辑。
/**
* @brief AT作业公共运行环境
*/
typedef struct at_env {
struct at_obj *obj;
//公共状态(根据需要添加),每次新作业启动时,这些值会被重置
int i, j, state;
//附属参数(引用自->at_attr_t)
void *params;
//设置下一个轮询等待间隔(只生效1次)
void (*next_wait)(struct at_env *self, unsigned int ms);
//复位计时器
void (*reset_timer)(struct at_env *self);
//作业超时判断
bool (*is_timeout)(struct at_env *self, unsigned int ms);
//带换行的格式化打印输出
void (*println)(struct at_env *self, const char *fmt, ...);
//接收内容包含判断
char * (*contains)(struct at_env *self, const char *str);
//获取接收缓冲区
char * (*recvbuf)(struct at_env *self);
//获取接收缓冲区长度
unsigned int(*recvlen)(struct at_env *self);
//清空接收缓冲区
void (*recvclr)(struct at_env *self);
//指示当前作业是否已被强行终止
bool (*disposing)(struct at_env *self);
//结束作业,并设置响应码
void (*finish)(struct at_env *self, at_resp_code code);
} at_env_t;
示例1:(Sierra 模组发送socket数据)
命令格式:
主机 =>
AT+KTCPSND=<session>,<send_length>
从机 <=
'CONNECT' //从机回复提示符'CONNECT'
主机 =>
<data> //发送二进制数据内容
"--EOF--Pattern--"" //发送结束符
从机 <=
OK //从机回复OK
代码实现:
//socket定义
typedef struct {
//....
int id;
unsigned char *sendptr;
int sendcnt;
//...
}socket_t;
/*
* @brief socket 数据发送处理
* @return true - 结束运行 false - 保持运行
*/
static int socket_send_handler(at_env_t *env)
{
socket_t *sk = (socket_t *)env->params;
switch (env->state) {
case 0:
env->println(env, "AT+KTCPSND=%d,%d", sk->id, sk->sendcnt);
env->reset_timer(env); /*重置定时器*/
env->state++;
break;
case 1:
if (env->contains(env, "CONNECT")) {
env->obj->adap->write(sk->sendptr, sk->sendcnt); /*发送数据*/
env->println(env, "--EOF--Pattern--"); /*发送结束符*/
env->reset_timer(env);
env->recvclr(env);
env->state++;
} else if (env->contains(env, "ERROR")) { /*匹配到错误,结束作业*/
env->finish(env, AT_RESP_ERROR);
} else if (env->is_timeout(env, 1000)) {
if (++env->i > 3) {
env->finish(env, AT_RESP_ERROR);
}
env->state--; /*重新发送*/
}
break;
case 2:
if (env->contains(env, "OK"))
env->finish(env, AT_RESP_OK); /*发送成功,设置状态为OK后退出*/
else if (env->contains(env, "ERROR") ||
env->is_timeout(env, 1000)) {
env->finish(env, AT_RESP_ERROR);
}
break;
}
return 0;
}
/**
* @brief socket数据发送请求
*/
static void sock_send_data(socket_t *sock)
{
at_do_work(at_obj, sock, socket_send_handler);
}
URC消息处理
未经请求主动上报的消息,又称URC(Unsolicited Result Code),在主机方未下发送命令请求的情况下,设备会根据自身的运行状态或者事件主动上报消息给主机。
根据URC消息格式的不同,可以分为以下几类:
- 对于大多数URC消息,通常是单行输出的,一般是以“+”为前缀,回车换行结束,例如:
+SIM: 1 \r\n //SIM卡状态
+CREG: 1,"24A4","000012CF",1\r\n //网络注册状态更新
- 也有不带前缀'+'的URC:
RDY \r\n //开机就绪
WIFI DISCONNECTED //WIFI断开
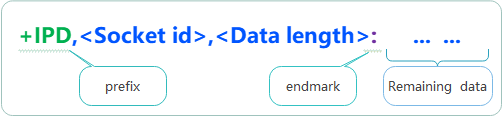
- 非回车换行结束的URC
socket数据接收(参考sim800 模组)。
+IPD,<socket id>,<data length>:<bin data>
可以看到,每个URC消息都有其特定的前缀信息,前两类是以'\n'作为结束符的,最后一种只有前缀,而整个URC消息帧是可变长度的,没有特定的结束符。那么该如何将这几类消息识别并提取出来的呢?实际上URC处理程序也是通过匹配"前缀"+"结束符"的方式来提取URC消息的,对于前两种消息,它们都有特定的结束符('\n'),只要匹配到消息"前缀"+"后缀"就可以将整条消息完整的提取出来;而对于最后一种消息,由于没有固定的结束符,而且消息长度是可变的,所以URC处理程序无法一次性将整条消息匹配并提取出来,往往需要分成多次进行,第一次是匹配它的头部信息,然后再由订阅者(通过回调)告诉它剩余待接收的数据长度,当剩余数据长度为0时,则该则URC消息接收完毕。这种处理方法其实同样也适用于前两类URC,不过这些消息的剩余数据长度为0罢了。
如下所示,我们可以把第3类URC消息拆分成两部分看待,固定头部+剩余数据。
由于URC具有一定的随机性,所以URC处理程序会实时读取来自设备端的上报的信息,然后再进行消息匹配处理。至于匹配哪种URC消息,则是由用户通过at_obj_set_urc设置的表来决定的。另外,考虑到性能的原因,URC处理程序不会一接收到任何一个字符都会启动匹配程序工作,而是遇到AT_URC_END_MARKS中规定的字符才会触发执行。
下面是at_obj_set_urc原型:
/**
* @brief Set the AT urc table.
*/
void at_obj_set_urc(at_obj_t *at, const urc_item_t *tbl, int count);
URC处理项(urc_item_t)
URC表的基本单位是urc_item_t,它用于描述每一条URC消息的处理规则,包括了消息头,结束标志还有该消息的处理程序。
/**
* @brief urc处理项
*/
typedef struct {
const char *prefix; /* 需要匹配的帧前缀,如+CSQ:25,*/
const char endmark; /* urc结束标志(参考@AT_URC_END_MARKS*/
/**
* @brief urc处理程序(prefix与endmark满足时触发)
* @params ctx - 上下文(Context)
* @return 表示当前URC帧剩余未接收字节数
* @arg 0 当前URC帧已接收完成,可以接收下一个URC
* @arg n 仍需要等待接收n个字节(AT管理器继续接收剩余数据并继续回调此接口)
*/
int (*handler)(at_urc_ctx_t *ctx);
} urc_item_t;
其中at_urc_ctx_t存储URC的接收状态和数据。
/**
* @brief URC 上下文(Context) 定义
*/
typedef struct {
urc_recv_state state; /* urc接收状态*/
char *urcbuf; /* urc数据缓冲区 */
int urclen; /* urc缓冲区已接收数据长度*/
} at_urc_ctx_t;
示例1(WIFI断开连接):
消息格式:
WIFI DISCONNECTED <\r\n>
代码实现:
/**
* @brief wifi断开事件
*/
static int wifi_connected_handler(at_urc_info_t *info)
{
printf("WIFI connection detected...\r\n");
return 0;
}
//...
/**
* @brief urc订阅表
*/
static const urc_item_t urc_table[] =
{
//其它URC...
{.prefix = "WIFI DISCONNECTED", .endmark = '\n', .handler = wifi_connected_handler}
};
示例2(socket数据接收):
URC消息格式:
+IPD,<socket id>,<data length>:.....
代码实现:
/**
* @brief socket数据接收处理
*/
static int urc_socket_data_handler(at_urc_info_t *ctx)
{
int length, total_length, sockid, i;
char *data;
if (sscanf(ctx->urcbuf, "+IPD,%d,%d:", &sockid, &length) == 2) { //解析出总数据长度
data = strchr(ctx->urcbuf, ':');
if (data == NULL)
return 0;
data++;
total_length = (data - ctx->urcbuf) + length; //计算头部长度
if (ctx->urclen < total_length) { //未接收全,返回剩余待接收数据
printf("Need to receive %d more bytes\r\n", total_length - ctx->urclen);
return total_length - ctx->urclen;
}
printf("%d bytes of data were received form socket %d!\r\n", length, sockid);
}
return 0;
}
//....
/**
* @brief urc订阅表
*/
static const urc_item_t urc_table[] =
{
//其它URC...
{.prefix = "+IPD,", .endmark = ':', .handler = urc_socket_data_handler}
};
多实例并存
AT通信对象并不只限于一个, at_obj_create允许你在同一个系统中创建多个共存的AT通信设备,而且每个都拥有自己独立的用于配置和资源.
//wifi 适配器
const at_adapter_t adap_wifi = {
//...
};
//modem适配器
const at_adapter_t adap_modem = {
//...
};
//...
at_obj_t *at_modem = at_obj_create(&modem_adapter);
at_obj_t *at_wifi = at_obj_create(&wifi_adapter);
//...
//轮询任务
/**
* @brief AT轮询程序
*/
void at_device_process(void)
{
static unsigned int timer = 0;
//(为了加快AT命令处理响应速度,建议5ms以内轮询一次)
if (at_get_ms() - timer > 5) {
timer = at_get_ms();
at_obj_process(at_modem);
at_obj_process(at_wifi);
}
}
AT作业上下文(at_context_t)
使用异步的一个弊端是它会让程序执行状态过于分散,增加程序编码和理解难度。比如一些代码需要根据异步的结果来执行下一步动作,一般是在异步回调中添加对应的状态标识,然后主程序根据这些状态标识来控制状态机或者程序分支的跳转,这使得代码间没有明显的流程线,代码执行流不好追踪管理。那么,在不使用同步或者不支持OS的情况下,如何避免异步带来的状态分散问题? 一种比较常用的方式是使用状态机轮询法,通过实时查询每一个异步请求的状态,并根据根据上一个结果执行下一个请求,这样代码执行上下文就紧密衔接在一块了,达到类似同步的效果。
对于异步AT请求,可以使用at_context_t获取其实时信息,包含当前的作业运行状态,命令执行结果及命令响应信息。使用AT上下文相关功能需要先启用AT_WORK_CONTEXT_EN宏, 相关API定义如下:
| 函数原型 | 说明 |
|---|---|
| void at_context_init(at_context_t *ctx, void *respbuf, unsigned bufsize); | 初始化一个at_context_t同时设置命令接收缓冲区。 |
| void at_context_attach(at_attr_t *attr, at_context_t *ctx); | 将at_context_t绑定到AT属性中。 |
| at_work_state at_work_get_state(at_context_t *ctx); | 通过at_context_t获取AT作业运行状态。 |
| bool at_work_is_finish(at_context_t *ctx); | 通过at_context_t获取AT作业完成状态。 |
| at_resp_code at_work_get_result(at_context_t *ctx); | 通过at_context_t获取AT请求状态码。 |
OS应用之异步转同步
如果是在OS环境下使用,很多时候我们更希望采用同步的方式执行AT命令请求,即原地等待命令执行完成,下面介绍两种异步转同步的方式。
轮询方式
轮询方式主要是基于at_context_t实现的,发送请求前通过绑定一个at_context_t实时监视命令的执行状态,然后循环检测命令是否执行完成。
示例:
/**
* @brief 发送命令(同步方式)
* @param respbuf 响应缓冲区
* @param bufsize 缓冲区大小
* @param timeout 超时时间
* @param cmd 命令
* @retval 命令执行状态
*/
static at_resp_code at_send_cmd_sync(char *respbuf, int bufsize, int timeout, const char *cmd, ...)
{
at_attr_t attr;
at_context_t ctx;
va_list args;
bool ret;
//属性初始化
at_attr_deinit(&attr);
attr.timeout = timeout;
attr.retry = 1;
//初始化context,并设置响应缓冲区
at_context_init(&ctx, respbuf, bufsize);
//为工作项绑定context
at_context_attach(&attr, &ctx);
va_start(args, cmd);
ret = at_exec_vcmd(at_obj, &attr, cmd, args);
va_end(args);
if (!ret) {
return AT_RESP_ERROR;
}
//等待命令执行完毕
while (!at_work_is_finish(&ctx)) {
usleep(1000);
}
return at_work_get_result(&ctx);
}
信号量方式
使用轮询方式会造成CPU空转,可以通过使用信号量来优化,不过实现起来比轮询方式要稍微复杂一些,
示例:
//...
#include "at_chat.h"
#include <pthread.h>
#include <semaphore.h>
typedef struct {
pthread_mutex_t cmd_lock; //命令锁
sem_t sem_finish; //完成信号
char *recvbuf; //命令接收缓冲区
unsigned short bufsize; //缓冲区大小
unsigned short recvcnt; //接收计数器
at_resp_code resp_code; //命令响应码
} at_watch_t;
static at_watch_t at_watch;
/**
* @brief 命令锁及信号相关初始化
*/
void at_sync_init(void)
{
sem_init(&at_watch.sem_finish, 0, 0);
pthread_mutex_init(&at_watch.cmd_lock, NULL);
}
/**
* @brief AT命令响应处理
*/
static void at_callback_handler(at_response_t *r)
{
int cnt = r->recvcnt;
at_watch.resp_code = r->code;
if (at_watch.recvbuf != NULL) {
if (cnt > at_watch.bufsize) {
//接收缓存不足
cnt = at_watch.bufsize;
}
memcpy(at_watch.recvbuf, r->recvbuf, cnt);
at_watch.recvcnt = cnt;
}
//通知命令已执行完毕
sem_post(&at_watch.sem_finish);
}
/**
* @brief 发送命令(同步方式)
* @param respbuf 响应缓冲区
* @param bufsize 缓冲区大小
* @param timeout 超时时间
* @param cmd 命令
* @retval 命令执行状态
*/
static at_resp_code at_send_cmd_sync(char *respbuf, int bufsize, int timeout, const char *cmd, ...)
{
at_attr_t attr;
va_list args;
bool ret;
//属性初始化
at_attr_deinit(&attr);
attr.timeout = timeout;
attr.retry = 1;
attr.cb = at_callback_handler;
va_start(args, cmd);
pthread_mutex_lock(&gw.sync_cmd_lock);
//设置接收缓冲区
at_watch.recvbuf = respbuf;
at_watch.bufsize = bufsize;
at_watch.recvcnt = 0;
at_watch.resp_code = AT_RESP_ERROR;
if (at_exec_vcmd(at_obj, &attr, cmd, args)) {
sem_wait(&at_watch.sem_finish); //等待命令执行完成
}
pthread_mutex_unlock(&gw.sync_cmd_lock);
va_end(args);
return at_watch.resp_code;
}
内存监视器
内存监视器
嵌入式系统的内存资源极其有限,不当的使用动态内存,严重时会导致死机,崩溃等问题。所以在使用动态内存内有必要加上一些限制手段,AT_MEM_LIMIT_SIZE规定了AT请求所用的最大内存数量,这样可以避免程序异常执行时过度执行AT请求导致内存不足的问题。至于分配多少主要取决于你的系统,如果你一开始并不确定用多少比较合适,可以先设置一个相对来说大一些的值,然后让程序运行一段时间观察使用情况再设置,可以通过at_max_used_memory和at_cur_used_memory可以获取历史最大内存使用量和当前内存使用量。
平台移植及配置
在使用前,你需要先进行平台移植,下面是下整个组件的目录结构:
at_chat
│
|───docs 使用文档
|───samples 演示案例
|───inlcude 头文件目录
| │───at_chat.h
| │───at_port.h
| │───linux_list.h
└───src
│───at_port.c
│───at_chat.c
平台移植
移植只涉及到3个接口实现及若干配置定义(at_port.h中声明了这些需要实现的接口及配置).
//内存申请,释放
void *at_malloc(unsigned int nbytes);
void at_free(void *ptr);
//获取系统毫秒数(从开机开始)
unsigned int at_get_ms(void);
内存相关接口实现
void *at_malloc(unsigned int nbytes)
{
return malloc(nbytes);
}
void at_free(void *ptr)
{
free(ptr);
}
系统时间获取接口实现
如果你使用的是MCU,可以通过定时器计数方式实现,参考下面的例程:
/* 滴答计数器*/
static volatile unsigned int tick = 0;
/**
* @brief 定时器中断服务程序(1ms 1次)
*/
void timer_handler(void)
{
tick++;
}
/**
* @brief 获取系统毫秒数
*/
unsigned int at_get_ms(void)
{
return tick;
}
对于linux系统,可以参考下面方式获取:
/**
* @brief 获取系统毫秒数
*/
unsigned int at_get_ms(void)
{
struct timeval tv_now;
//这里需要注意的是,当系统时间被更改后,会获取到一个错误的值,造成命令超时(代码仅做的演示)。
gettimeofday(&tv_now, NULL);
return (tv_now.tv_sec * 1000000 + tv_now.tv_usec) / 1000;
}
配置说明
这些配置项主用于命令交互响应设置,内存使用限制及模块开关等,实际应用时需要考虑你所在系统的资源情况,对于大多数情况,默认值已经够用。
| 配置项 | 默认值 | 配置说明 |
|---|---|---|
| AT_DEF_RESP_OK | "OK" | 默认AT命令正确响应,当匹配到此值到,状态码返回AT_RESP_OK |
| AT_DEF_RESP_ERR | "ERROR" | 默认AT命令错误响应,当匹配到此值到,状态码返回AT_RESP_ERR |
| AT_DEF_TIMEOUT | 500 | 默认AT响应超时时间(ms),当命令超时时,状态码返回AT_RESP_TIMEOUT |
| AT_DEF_RETRY | 2 | 当发生AT响应错误或者超时时重发次数 |
| AT_URC_TIMEOUT | 1000 | 默认URC帧超时时间(ms) |
| AT_MAX_CMD_LEN | 256 | 最大命令长度(用于可变参数命令内存限制). |
| AT_LIST_WORK_COUNT | 32 | 它规定了同时能够支持的AT异步请求个数, 他可以限制应用程序(使用不当时)短时间内大量突发请求造成内存不足的问题,一般来说8-16已经够用了. |
| AT_URC_WARCH_EN | 1 | URC消息监视使能 |
| AT_URC_END_MARKS | ":,\n" | URC结束标记列表,越少越好,因为URC匹配程序会根据此列表对接收到的字符做URC结束帧匹配处理,列表太大会影响程序性能. |
| AT_MEM_WATCH_EN | 1u | 内存监视使能 |
| AT_MEM_LIMIT_SIZE | (3 * 1024) | 内存使用限制 |
| AT_WORK_CONTEXT_EN | 1u | AT作业上下文相关接口 |