mirror of
https://github.com/hathach/tinyusb.git
synced 2025-01-17 05:32:55 +08:00
Merge branch 'master' into vendor_class_zero_length_transfer
This commit is contained in:
commit
36ce6fad8c
66
.clang-format
Normal file
66
.clang-format
Normal file
@ -0,0 +1,66 @@
|
||||
# Generated from CLion C/C++ Code Style settings
|
||||
BasedOnStyle: LLVM
|
||||
AccessModifierOffset: -2
|
||||
AlignAfterOpenBracket: Align
|
||||
AlignConsecutiveAssignments: None
|
||||
AlignOperands: Align
|
||||
AllowAllArgumentsOnNextLine: false
|
||||
AllowAllConstructorInitializersOnNextLine: false
|
||||
AllowAllParametersOfDeclarationOnNextLine: false
|
||||
AllowShortBlocksOnASingleLine: Always
|
||||
AllowShortCaseLabelsOnASingleLine: false
|
||||
AllowShortFunctionsOnASingleLine: All
|
||||
AllowShortIfStatementsOnASingleLine: Always
|
||||
AllowShortLambdasOnASingleLine: All
|
||||
AllowShortLoopsOnASingleLine: true
|
||||
AlwaysBreakAfterReturnType: None
|
||||
AlwaysBreakTemplateDeclarations: Yes
|
||||
BreakBeforeBraces: Custom
|
||||
BraceWrapping:
|
||||
AfterCaseLabel: false
|
||||
AfterClass: false
|
||||
AfterControlStatement: Never
|
||||
AfterEnum: false
|
||||
AfterFunction: false
|
||||
AfterNamespace: false
|
||||
AfterUnion: false
|
||||
BeforeCatch: false
|
||||
BeforeElse: false
|
||||
IndentBraces: false
|
||||
SplitEmptyFunction: false
|
||||
SplitEmptyRecord: true
|
||||
BreakBeforeBinaryOperators: None
|
||||
BreakBeforeTernaryOperators: true
|
||||
BreakConstructorInitializers: BeforeColon
|
||||
BreakInheritanceList: BeforeColon
|
||||
ColumnLimit: 0
|
||||
CompactNamespaces: false
|
||||
ContinuationIndentWidth: 4
|
||||
IndentCaseLabels: true
|
||||
IndentPPDirectives: BeforeHash
|
||||
IndentWidth: 2
|
||||
KeepEmptyLinesAtTheStartOfBlocks: true
|
||||
MaxEmptyLinesToKeep: 2
|
||||
NamespaceIndentation: All
|
||||
ObjCSpaceAfterProperty: false
|
||||
ObjCSpaceBeforeProtocolList: true
|
||||
PointerAlignment: Right
|
||||
ReflowComments: false
|
||||
SpaceAfterCStyleCast: true
|
||||
SpaceAfterLogicalNot: false
|
||||
SpaceAfterTemplateKeyword: false
|
||||
SpaceBeforeAssignmentOperators: true
|
||||
SpaceBeforeCpp11BracedList: false
|
||||
SpaceBeforeCtorInitializerColon: true
|
||||
SpaceBeforeInheritanceColon: true
|
||||
SpaceBeforeParens: ControlStatements
|
||||
SpaceBeforeRangeBasedForLoopColon: false
|
||||
SpaceInEmptyParentheses: false
|
||||
SpacesBeforeTrailingComments: 0
|
||||
SpacesInAngles: false
|
||||
SpacesInCStyleCastParentheses: false
|
||||
SpacesInContainerLiterals: true
|
||||
SpacesInParentheses: false
|
||||
SpacesInSquareBrackets: false
|
||||
TabWidth: 2
|
||||
UseTab: Never
|
||||
10
.codespellrc
Normal file
10
.codespellrc
Normal file
@ -0,0 +1,10 @@
|
||||
# See: https://github.com/codespell-project/codespell#using-a-config-file
|
||||
[codespell]
|
||||
# In the event of a false positive, add the problematic word, in all lowercase, to 'ignore-words.txt' (one word per line).
|
||||
# Or copy & paste the whole problematic line to 'exclude-file.txt'
|
||||
ignore-words = tools/codespell/ignore-words.txt
|
||||
exclude-file = tools/codespell/exclude-file.txt
|
||||
check-filenames =
|
||||
check-hidden =
|
||||
count =
|
||||
skip = *.rb,.cproject,.git,./lib,./examples/*/*/_build,./examples/*/*/ses,./examples/*/*/ozone,./hw/mcu,./tests_obsolete
|
||||
6
.gitattributes
vendored
6
.gitattributes
vendored
@ -1,10 +1,10 @@
|
||||
# Set the default behavior, in case people don't have core.autocrlf set.
|
||||
* text=auto
|
||||
|
||||
*.c text
|
||||
*.cpp text
|
||||
*.c text
|
||||
*.cpp text
|
||||
*.h text
|
||||
*.icf text
|
||||
*.icf text
|
||||
*.js text
|
||||
*.json text
|
||||
*.ld text
|
||||
|
||||
36
.github/ISSUE_TEMPLATE/bug_report.md
vendored
36
.github/ISSUE_TEMPLATE/bug_report.md
vendored
@ -1,36 +0,0 @@
|
||||
---
|
||||
name: Bug Report
|
||||
about: Create a report to help us improve
|
||||
title: 'Please provide all details at least for Setup/Describe/Reproduce'
|
||||
labels: Bug 🐞
|
||||
assignees: ''
|
||||
|
||||
---
|
||||
|
||||
**Set Up**
|
||||
|
||||
- **PC OS** e.g Ubuntu 20.04 / Windows 10/ macOS 10.15
|
||||
- **Board** e.g Feather nRF52840 Express (if custom specify your MCUs)
|
||||
- **TinyUSB version** relase version or git hash (preferrably running with master for lastest code)
|
||||
- **Firmware** e.g examples/device/cdc_msc
|
||||
|
||||
**Describe The Bug**
|
||||
|
||||
A clear and concise description of what the bug is.
|
||||
|
||||
**To Reproduce**
|
||||
|
||||
Steps to reproduce the behavior:
|
||||
1. Go to '...'
|
||||
2. Click on '....'
|
||||
3. See error
|
||||
|
||||
**Screenshots**
|
||||
|
||||
If applicable, add screenshots, bus capture to help explain your problem.
|
||||
|
||||
**Log**
|
||||
|
||||
If applicable, provide the stack's log (uart/rtt/swo) where the issue occurred, best with comments to explain the actual events. If the log is too long, attach it as txt file instead.
|
||||
|
||||
Note: To enable logging, add `LOG=2` to to the make command if building with stock examples or set `CFG_TUSB_DEBUG=2` in your tusb_config.h. More information can be found at [example's readme](/docs/getting_started.md)
|
||||
86
.github/ISSUE_TEMPLATE/bug_report.yml
vendored
Normal file
86
.github/ISSUE_TEMPLATE/bug_report.yml
vendored
Normal file
@ -0,0 +1,86 @@
|
||||
name: Bug Report
|
||||
description: Report a problem with TinyUSB
|
||||
labels: 'Bug 🐞'
|
||||
body:
|
||||
- type: markdown
|
||||
attributes:
|
||||
value: |
|
||||
Thanks for taking the time to fill out this bug report!
|
||||
It's okay to leave some blank if it doesn't apply to your problem.
|
||||
|
||||
- type: dropdown
|
||||
attributes:
|
||||
label: Operating System
|
||||
options:
|
||||
- Linux
|
||||
- MacOS
|
||||
- RaspberryPi OS
|
||||
- Windows 7
|
||||
- Windows 10
|
||||
- Windows 11
|
||||
- Others
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: input
|
||||
attributes:
|
||||
label: Board
|
||||
placeholder: e.g Feather nRF52840 Express
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: textarea
|
||||
attributes:
|
||||
label: Firmware
|
||||
placeholder: |
|
||||
e.g examples/device/cdc_msc. If it is custom firmware, it is preferably compiled like one in example folder and reviewable for people to comment on. The easiest way is
|
||||
- Fork this repo, checkout a new branch
|
||||
- Add your-own-example based on stock one
|
||||
- Push and post it here.
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: textarea
|
||||
attributes:
|
||||
label: What happened ?
|
||||
placeholder: A clear and concise description of what the bug is.
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: textarea
|
||||
attributes:
|
||||
label: How to reproduce ?
|
||||
placeholder: |
|
||||
Exact steps in chronological order, details should be specific e.g if you use a command/script to test with, please post it as well.
|
||||
1. Go to '...'
|
||||
2. Click on '....'
|
||||
3. See error
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: textarea
|
||||
attributes:
|
||||
label: Debug Log as txt file (LOG/CFG_TUSB_DEBUG=2)
|
||||
placeholder: |
|
||||
Attach your debug log txt file here, where the issue occurred, best with comments to explain the actual events.
|
||||
|
||||
Note1: Please DO NOT paste your lengthy log contents here since it hurts the readability.
|
||||
Note2: To enable logging, add `LOG=2` to to the make command if building with stock examples or set `CFG_TUSB_DEBUG=2` in your tusb_config.h.
|
||||
More information can be found at [example's readme](https://github.com/hathach/tinyusb/blob/master/docs/getting_started.md)
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: textarea
|
||||
attributes:
|
||||
label: Screenshots
|
||||
description: If applicable, add screenshots to help explain your problem.
|
||||
validations:
|
||||
required: false
|
||||
|
||||
- type: checkboxes
|
||||
attributes:
|
||||
label: I have checked existing issues, dicussion and documentation
|
||||
description: You agree to check all the resources above before opening a new issue.
|
||||
options:
|
||||
- label: I confirm I have checked existing issues, dicussion and documentation.
|
||||
required: true
|
||||
4
.github/ISSUE_TEMPLATE/config.yml
vendored
4
.github/ISSUE_TEMPLATE/config.yml
vendored
@ -1,4 +1,8 @@
|
||||
blank_issues_enabled: false
|
||||
contact_links:
|
||||
- name: TinyUSB Discussion
|
||||
url: https://github.com/hathach/tinyusb/discussions
|
||||
about: If you have other questions or need help, post it here.
|
||||
- name: TinyUSB Docs
|
||||
url: https://docs.tinyusb.org/
|
||||
about: Online documentation
|
||||
|
||||
14
.github/ISSUE_TEMPLATE/feature_request.md
vendored
14
.github/ISSUE_TEMPLATE/feature_request.md
vendored
@ -1,14 +0,0 @@
|
||||
---
|
||||
name: Feature Request
|
||||
about: Suggest an idea for this project
|
||||
title: ''
|
||||
labels: Feature 💡
|
||||
assignees: ''
|
||||
|
||||
---
|
||||
|
||||
**Is your feature request related to a problem? Please describe.**
|
||||
A clear and concise description of what the problem is. Ex. I'm always frustrated when [...]
|
||||
|
||||
**Describe the solution you'd like**
|
||||
A clear and concise description of what you want to happen.
|
||||
49
.github/ISSUE_TEMPLATE/feature_request.yml
vendored
Normal file
49
.github/ISSUE_TEMPLATE/feature_request.yml
vendored
Normal file
@ -0,0 +1,49 @@
|
||||
name: Feature Request
|
||||
description: Suggest an idea for this project
|
||||
labels: 'Feature 💡'
|
||||
body:
|
||||
- type: markdown
|
||||
attributes:
|
||||
value: |
|
||||
Thanks for taking the time to fill out this request!
|
||||
It's okay to leave some blank if it doesn't apply to your request.
|
||||
|
||||
- type: input
|
||||
attributes:
|
||||
label: Related area
|
||||
description: Please briefly explain the area of your Feature Request.
|
||||
placeholder: eg. new port support, device stack, class driver ...
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: input
|
||||
attributes:
|
||||
label: Hardware specification
|
||||
description: Please provide if your proposal depends on specific Hardware.
|
||||
placeholder: eg. rp2040, samd51 ...
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: textarea
|
||||
attributes:
|
||||
label: Is your feature request related to a problem?
|
||||
description: Please provide a clear and concise description of what the problem is. Add relevant issue link.
|
||||
placeholder: ex. I'm facing the issue/missing function...
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: textarea
|
||||
attributes:
|
||||
label: Describe the solution you'd like
|
||||
description: Please provide a clear and concise description of what you want to happen.
|
||||
placeholder: ex. When using this function...
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: checkboxes
|
||||
attributes:
|
||||
label: I have checked existing issues, dicussion and documentation
|
||||
description: You agree to check all the resources above before opening a new issue.
|
||||
options:
|
||||
- label: I confirm I have checked existing issues, dicussion and documentation.
|
||||
required: true
|
||||
143
.github/workflows/build.yml
vendored
143
.github/workflows/build.yml
vendored
@ -1,143 +0,0 @@
|
||||
name: Build ARM
|
||||
|
||||
on:
|
||||
pull_request:
|
||||
push:
|
||||
release:
|
||||
types:
|
||||
- created
|
||||
|
||||
jobs:
|
||||
# ---------------------------------------
|
||||
# Unit testing with Ceedling
|
||||
# ---------------------------------------
|
||||
unit-test:
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- name: Setup Ruby
|
||||
uses: actions/setup-ruby@v1
|
||||
with:
|
||||
ruby-version: '2.7'
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v2
|
||||
|
||||
- name: Unit Tests
|
||||
run: |
|
||||
# Install Ceedling
|
||||
gem install ceedling
|
||||
cd test
|
||||
ceedling test:all
|
||||
|
||||
# ---------------------------------------
|
||||
# Build ARM family
|
||||
# ---------------------------------------
|
||||
build-arm:
|
||||
runs-on: ubuntu-latest
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
family:
|
||||
# Alphabetical order
|
||||
- 'imxrt'
|
||||
- 'lpc15'
|
||||
- 'lpc18'
|
||||
- 'lpc54'
|
||||
- 'lpc55'
|
||||
- 'nrf'
|
||||
- 'rp2040'
|
||||
- 'samd11'
|
||||
- 'samd21'
|
||||
- 'samd51'
|
||||
- 'saml22'
|
||||
- 'stm32f0'
|
||||
- 'stm32f4'
|
||||
- 'stm32f7'
|
||||
- 'stm32h7'
|
||||
steps:
|
||||
- name: Setup Python
|
||||
uses: actions/setup-python@v2
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v2
|
||||
|
||||
- name: Checkout common submodules in lib
|
||||
run: git submodule update --init lib/FreeRTOS-Kernel lib/lwip lib/sct_neopixel
|
||||
|
||||
- name: Checkout pico-sdk
|
||||
if: matrix.family == 'rp2040'
|
||||
run: |
|
||||
git clone --depth 1 -b develop https://github.com/raspberrypi/pico-sdk ~/pico-sdk
|
||||
echo >> $GITHUB_ENV PICO_SDK_PATH=~/pico-sdk
|
||||
|
||||
- name: Set Toolchain URL
|
||||
run: echo >> $GITHUB_ENV TOOLCHAIN_URL=https://github.com/xpack-dev-tools/arm-none-eabi-gcc-xpack/releases/download/v10.2.1-1.1/xpack-arm-none-eabi-gcc-10.2.1-1.1-linux-x64.tar.gz
|
||||
|
||||
- name: Cache Toolchain
|
||||
uses: actions/cache@v2
|
||||
id: cache-toolchain
|
||||
with:
|
||||
path: ~/cache/
|
||||
key: ${{ runner.os }}-21-03-04-${{ env.TOOLCHAIN_URL }}
|
||||
|
||||
- name: Install Toolchain
|
||||
if: steps.cache-toolchain.outputs.cache-hit != 'true'
|
||||
run: |
|
||||
mkdir -p ~/cache/toolchain
|
||||
wget --progress=dot:mega $TOOLCHAIN_URL -O toolchain.tar.gz
|
||||
tar -C ~/cache/toolchain -xaf toolchain.tar.gz
|
||||
|
||||
- name: Set Toolchain Path
|
||||
run: echo >> $GITHUB_PATH `echo ~/cache/toolchain/*/bin`
|
||||
|
||||
- name: Build
|
||||
run: python3 tools/build_family.py ${{ matrix.family }}
|
||||
|
||||
# ---------------------------------------
|
||||
# Build all no-family (opharned) boards
|
||||
# ---------------------------------------
|
||||
build-board:
|
||||
runs-on: ubuntu-latest
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
example:
|
||||
# Alphabetical order, a group of 4
|
||||
- 'device/audio_test device/board_test device/cdc_dual_ports device/cdc_msc'
|
||||
- 'device/cdc_msc_freertos device/dfu_runtime device/hid_composite device/hid_composite_freertos'
|
||||
- 'device/hid_generic_inout device/hid_multiple_interface device/midi_test device/msc_dual_lun'
|
||||
- 'device/net_lwip_webserver'
|
||||
- 'device/uac2_headset device/usbtmc device/webusb_serial host/cdc_msc_hid'
|
||||
|
||||
steps:
|
||||
- name: Setup Python
|
||||
uses: actions/setup-python@v2
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v2
|
||||
|
||||
- name: Checkout common submodules in lib
|
||||
run: git submodule update --init lib/FreeRTOS-Kernel lib/lwip
|
||||
|
||||
- name: Set Toolchain URL
|
||||
run: echo >> $GITHUB_ENV TOOLCHAIN_URL=https://github.com/xpack-dev-tools/arm-none-eabi-gcc-xpack/releases/download/v10.2.1-1.1/xpack-arm-none-eabi-gcc-10.2.1-1.1-linux-x64.tar.gz
|
||||
|
||||
- name: Cache Toolchain
|
||||
uses: actions/cache@v2
|
||||
id: cache-toolchain
|
||||
with:
|
||||
path: ~/cache/
|
||||
key: ${{ runner.os }}-21-03-04-${{ env.TOOLCHAIN_URL }}
|
||||
|
||||
- name: Install Toolchain
|
||||
if: steps.cache-toolchain.outputs.cache-hit != 'true'
|
||||
run: |
|
||||
mkdir -p ~/cache/toolchain
|
||||
wget --progress=dot:mega $TOOLCHAIN_URL -O toolchain.tar.gz
|
||||
tar -C ~/cache/toolchain -xaf toolchain.tar.gz
|
||||
|
||||
- name: Set Toolchain Path
|
||||
run: echo >> $GITHUB_PATH `echo ~/cache/toolchain/*/bin`
|
||||
|
||||
- name: Build
|
||||
run: python3 tools/build_board.py ${{ matrix.example }}
|
||||
70
.github/workflows/build_aarch64.yml
vendored
Normal file
70
.github/workflows/build_aarch64.yml
vendored
Normal file
@ -0,0 +1,70 @@
|
||||
name: Build AArch64
|
||||
|
||||
on:
|
||||
workflow_dispatch:
|
||||
push:
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- '.github/workflows/build_aarch64.yml'
|
||||
pull_request:
|
||||
branches: [ master ]
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- '.github/workflows/build_aarch64.yml'
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.run_id }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
# ---------------------------------------
|
||||
# Build AARCH64 family
|
||||
# ---------------------------------------
|
||||
build-arm:
|
||||
runs-on: ubuntu-latest
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
family:
|
||||
# Alphabetical order
|
||||
- 'broadcom_64bit'
|
||||
steps:
|
||||
- name: Setup Python
|
||||
uses: actions/setup-python@v5
|
||||
with:
|
||||
python-version: '3.x'
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Set Toolchain URL
|
||||
run: echo >> $GITHUB_ENV TOOLCHAIN_URL=https://developer.arm.com/-/media/Files/downloads/gnu-a/10.3-2021.07/binrel/gcc-arm-10.3-2021.07-x86_64-aarch64-none-elf.tar.xz
|
||||
|
||||
- name: Cache Toolchain
|
||||
uses: actions/cache@v4
|
||||
id: cache-toolchain
|
||||
with:
|
||||
path: ~/cache/
|
||||
key: ${{ runner.os }}-21-11-02-${{ env.TOOLCHAIN_URL }}
|
||||
|
||||
- name: Install Toolchain
|
||||
if: steps.cache-toolchain.outputs.cache-hit != 'true'
|
||||
run: |
|
||||
mkdir -p ~/cache/toolchain
|
||||
wget --progress=dot:mega $TOOLCHAIN_URL -O toolchain.tar.gz
|
||||
tar -C ~/cache/toolchain -xaf toolchain.tar.gz
|
||||
|
||||
- name: Set Toolchain Path
|
||||
run: echo >> $GITHUB_PATH `echo ~/cache/toolchain/*/bin`
|
||||
|
||||
- name: Get Dependencies
|
||||
run: python3 tools/get_deps.py ${{ matrix.family }}
|
||||
|
||||
- name: Build
|
||||
run: python3 tools/build_make.py ${{ matrix.family }}
|
||||
57
.github/workflows/build_arm.yml
vendored
Normal file
57
.github/workflows/build_arm.yml
vendored
Normal file
@ -0,0 +1,57 @@
|
||||
name: Build ARM
|
||||
|
||||
on:
|
||||
workflow_dispatch:
|
||||
push:
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- 'tools/get_deps.py'
|
||||
- '.github/workflows/build_arm.yml'
|
||||
pull_request:
|
||||
branches: [ master ]
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- 'tools/get_deps.py'
|
||||
- '.github/workflows/build_arm.yml'
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.run_id }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
# ---------------------------------------
|
||||
# Build ARM family
|
||||
# ---------------------------------------
|
||||
build-arm:
|
||||
runs-on: ubuntu-latest
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
family:
|
||||
# Alphabetical order
|
||||
- 'mm32'
|
||||
steps:
|
||||
- name: Setup Python
|
||||
uses: actions/setup-python@v5
|
||||
with:
|
||||
python-version: '3.x'
|
||||
|
||||
- name: Install ARM GCC
|
||||
uses: carlosperate/arm-none-eabi-gcc-action@v1
|
||||
with:
|
||||
release: '11.2-2022.02'
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Get Dependencies
|
||||
run: python3 tools/get_deps.py ${{ matrix.family }}
|
||||
|
||||
- name: Build
|
||||
run: python3 tools/build_make.py ${{ matrix.family }}
|
||||
298
.github/workflows/build_cmake.yml
vendored
Normal file
298
.github/workflows/build_cmake.yml
vendored
Normal file
@ -0,0 +1,298 @@
|
||||
name: Build CMake
|
||||
|
||||
on:
|
||||
workflow_dispatch:
|
||||
push:
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- 'test/hil/**'
|
||||
- 'tools/get_deps.py'
|
||||
- '.github/workflows/build_cmake.yml'
|
||||
pull_request:
|
||||
branches: [ master ]
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- 'test/hil/**'
|
||||
- 'tools/get_deps.py'
|
||||
- '.github/workflows/build_cmake.yml'
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.run_id }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
# ---------------------------------------
|
||||
# Build ARM with GCC
|
||||
# ---------------------------------------
|
||||
arm-gcc:
|
||||
runs-on: ubuntu-latest
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
family:
|
||||
# Alphabetical order
|
||||
- 'broadcom_32bit'
|
||||
- 'imxrt'
|
||||
- 'kinetis_k kinetis_kl kinetis_k32l2'
|
||||
- 'lpc11 lpc13 lpc15'
|
||||
- 'lpc17 lpc18 lpc40 lpc43'
|
||||
- 'lpc51 lpc54 lpc55'
|
||||
- 'mcx'
|
||||
- 'msp432e4'
|
||||
- 'mm32'
|
||||
- 'nrf'
|
||||
- 'ra'
|
||||
- 'rp2040'
|
||||
- 'samd11 samd21 saml2x samd5x_e5x samg'
|
||||
- 'stm32f0'
|
||||
- 'stm32f1'
|
||||
- 'stm32f2'
|
||||
- 'stm32f3'
|
||||
- 'stm32f4'
|
||||
- 'stm32f7'
|
||||
- 'stm32g0'
|
||||
- 'stm32g4'
|
||||
- 'stm32h5'
|
||||
- 'stm32h7'
|
||||
- 'stm32l4'
|
||||
- 'stm32u5'
|
||||
- 'stm32wb'
|
||||
- 'tm4c'
|
||||
- 'xmc4000'
|
||||
steps:
|
||||
- name: Setup Python
|
||||
uses: actions/setup-python@v5
|
||||
with:
|
||||
python-version: '3.x'
|
||||
|
||||
- name: Install ARM GCC
|
||||
uses: carlosperate/arm-none-eabi-gcc-action@v1
|
||||
with:
|
||||
release: '12.3.Rel1'
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Checkout pico-sdk for rp2040
|
||||
if: matrix.family == 'rp2040'
|
||||
uses: actions/checkout@v4
|
||||
with:
|
||||
repository: raspberrypi/pico-sdk
|
||||
ref: develop
|
||||
path: pico-sdk
|
||||
|
||||
- name: Get Dependencies
|
||||
run: |
|
||||
sudo apt install -y ninja-build
|
||||
python3 tools/get_deps.py ${{ matrix.family }}
|
||||
|
||||
- name: Build
|
||||
run: python tools/build_cmake.py ${{ matrix.family }}
|
||||
env:
|
||||
PICO_SDK_PATH: ${{ github.workspace }}/pico-sdk
|
||||
|
||||
- name: Upload Artifacts for Hardware Testing (rp2040)
|
||||
if: contains(matrix.family, 'rp2040') && github.repository_owner == 'hathach'
|
||||
uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: raspberry_pi_pico
|
||||
path: |
|
||||
cmake-build/cmake-build-raspberry_pi_pico/*/*/*.elf
|
||||
|
||||
- name: Upload Artifacts for Hardware Testing (nRF)
|
||||
if: contains(matrix.family, 'nrf') && github.repository_owner == 'hathach'
|
||||
uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: feather_nrf52840_express
|
||||
path: |
|
||||
cmake-build/cmake-build-feather_nrf52840_express/*/*/*.elf
|
||||
|
||||
- name: Upload Artifacts for Hardware Testing (samd51)
|
||||
if: contains(matrix.family, 'samd5x_e5x') && github.repository_owner == 'hathach'
|
||||
uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: itsybitsy_m4
|
||||
path: |
|
||||
cmake-build/cmake-build-itsybitsy_m4/*/*/*.bin
|
||||
|
||||
# ---------------------------------------
|
||||
# Build ARM with Clang
|
||||
# ---------------------------------------
|
||||
arm-clang:
|
||||
runs-on: ubuntu-latest
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
family:
|
||||
# Alphabetical order
|
||||
- 'imxrt'
|
||||
- 'kinetis_k kinetis_kl'
|
||||
- 'lpc17 lpc18 lpc40 lpc43'
|
||||
- 'lpc54 lpc55'
|
||||
#- 'mcx' not working with gcc anymore, need to fix this first
|
||||
- 'nrf'
|
||||
#- 'ra' port later
|
||||
#- 'rp2040' port later
|
||||
- 'samd21'
|
||||
- 'samd5x_e5x'
|
||||
- 'stm32f0'
|
||||
- 'stm32f1'
|
||||
- 'stm32f2'
|
||||
- 'stm32f3'
|
||||
- 'stm32f4'
|
||||
- 'stm32f7'
|
||||
- 'stm32g0'
|
||||
- 'stm32g4'
|
||||
- 'stm32h5'
|
||||
- 'stm32h7'
|
||||
- 'stm32l4'
|
||||
- 'stm32u5'
|
||||
steps:
|
||||
- name: Setup Python
|
||||
uses: actions/setup-python@v5
|
||||
with:
|
||||
python-version: '3.x'
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Checkout pico-sdk for rp2040
|
||||
if: matrix.family == 'rp2040'
|
||||
uses: actions/checkout@v4
|
||||
with:
|
||||
repository: raspberrypi/pico-sdk
|
||||
ref: develop
|
||||
path: pico-sdk
|
||||
|
||||
- name: Set Toolchain URL
|
||||
run: echo >> $GITHUB_ENV TOOLCHAIN_URL=https://github.com/ARM-software/LLVM-embedded-toolchain-for-Arm/releases/download/release-17.0.1/LLVMEmbeddedToolchainForArm-17.0.1-Linux-x86_64.tar.xz
|
||||
|
||||
- name: Cache Toolchain
|
||||
uses: actions/cache@v4
|
||||
id: cache-toolchain
|
||||
with:
|
||||
path: ~/cache/
|
||||
key: ${{ runner.os }}-24-04-17-${{ env.TOOLCHAIN_URL }}
|
||||
|
||||
- name: Install Toolchain
|
||||
if: steps.cache-toolchain.outputs.cache-hit != 'true'
|
||||
run: |
|
||||
mkdir -p ~/cache/toolchain
|
||||
wget --progress=dot:mega $TOOLCHAIN_URL -O toolchain.tar.xz
|
||||
tar -C ~/cache/toolchain -xaf toolchain.tar.xz
|
||||
|
||||
- name: Prepare to build
|
||||
run: |
|
||||
echo >> $GITHUB_PATH `echo ~/cache/toolchain/*/bin`
|
||||
sudo apt install -y ninja-build
|
||||
python3 tools/get_deps.py ${{ matrix.family }}
|
||||
|
||||
- name: Build
|
||||
run: python tools/build_cmake.py ${{ matrix.family }} -DTOOLCHAIN=clang
|
||||
env:
|
||||
PICO_SDK_PATH: ${{ github.workspace }}/pico-sdk
|
||||
|
||||
# ---------------------------------------
|
||||
# Build MSP430 with GCC
|
||||
# ---------------------------------------
|
||||
msp430-gcc:
|
||||
runs-on: ubuntu-latest
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
family:
|
||||
# Alphabetical order
|
||||
- 'msp430'
|
||||
steps:
|
||||
- name: Setup Python
|
||||
uses: actions/setup-python@v5
|
||||
with:
|
||||
python-version: '3.x'
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Set Toolchain URL
|
||||
run: echo >> $GITHUB_ENV TOOLCHAIN_URL=http://software-dl.ti.com/msp430/msp430_public_sw/mcu/msp430/MSPGCC/9_2_0_0/export/msp430-gcc-9.2.0.50_linux64.tar.bz2
|
||||
|
||||
- name: Cache Toolchain
|
||||
uses: actions/cache@v4
|
||||
id: cache-toolchain
|
||||
with:
|
||||
path: ~/cache/
|
||||
key: ${{ runner.os }}-24-04-17-${{ env.TOOLCHAIN_URL }}
|
||||
|
||||
- name: Install Toolchain
|
||||
if: steps.cache-toolchain.outputs.cache-hit != 'true'
|
||||
run: |
|
||||
mkdir -p ~/cache/toolchain
|
||||
wget --progress=dot:mega $TOOLCHAIN_URL -O toolchain.tar.bz2
|
||||
tar -C ~/cache/toolchain -xaf toolchain.tar.bz2
|
||||
|
||||
- name: Prepare to build
|
||||
run: |
|
||||
echo >> $GITHUB_PATH `echo ~/cache/toolchain/*/bin`
|
||||
sudo apt install -y ninja-build
|
||||
python3 tools/get_deps.py ${{ matrix.family }}
|
||||
|
||||
- name: Build
|
||||
run: python tools/build_cmake.py ${{ matrix.family }}
|
||||
|
||||
# ---------------------------------------
|
||||
# Hardware in the loop (HIL)
|
||||
# Current self-hosted instance is running on an RPI4. For attached hardware checkout hil_pi4.json
|
||||
# ---------------------------------------
|
||||
hil-test:
|
||||
# run only with hathach's commit due to limited resource on RPI4
|
||||
if: github.repository_owner == 'hathach'
|
||||
needs: arm-gcc
|
||||
runs-on: [self-hosted, rp2040, nrf52840, hardware-in-the-loop]
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
board:
|
||||
- 'feather_nrf52840_express'
|
||||
- 'itsybitsy_m4'
|
||||
- 'raspberry_pi_pico'
|
||||
steps:
|
||||
- name: Clean workspace
|
||||
run: |
|
||||
echo "Cleaning up previous run"
|
||||
rm -rf "${{ github.workspace }}"
|
||||
mkdir -p "${{ github.workspace }}"
|
||||
|
||||
# USB bus on rpi4 is not stable, reset it before testing
|
||||
- name: Reset USB bus
|
||||
run: |
|
||||
lsusb
|
||||
lsusb -t
|
||||
# reset VIA Labs 2.0 hub
|
||||
sudo usbreset 001/002
|
||||
|
||||
# legacy code
|
||||
#for port in $(lspci | grep USB | cut -d' ' -f1); do
|
||||
# echo -n "0000:${port}"| sudo tee /sys/bus/pci/drivers/xhci_hcd/unbind;
|
||||
# sleep 0.1;
|
||||
# echo -n "0000:${port}" | sudo tee /sys/bus/pci/drivers/xhci_hcd/bind;
|
||||
#done
|
||||
|
||||
- name: Checkout test/hil
|
||||
uses: actions/checkout@v4
|
||||
with:
|
||||
sparse-checkout: test/hil
|
||||
|
||||
- name: Download Artifacts
|
||||
uses: actions/download-artifact@v4
|
||||
with:
|
||||
name: ${{ matrix.board }}
|
||||
path: cmake-build/cmake-build-${{ matrix.board }}
|
||||
|
||||
- name: Test on actual hardware
|
||||
run: |
|
||||
python3 test/hil/hil_test.py --board ${{ matrix.board }} hil_pi4.json
|
||||
103
.github/workflows/build_esp.yml
vendored
103
.github/workflows/build_esp.yml
vendored
@ -1,11 +1,28 @@
|
||||
name: Build ESP
|
||||
|
||||
on:
|
||||
pull_request:
|
||||
workflow_dispatch:
|
||||
push:
|
||||
release:
|
||||
types:
|
||||
- created
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- 'test/hil/**'
|
||||
- '.github/workflows/build_esp.yml'
|
||||
pull_request:
|
||||
branches: [ master ]
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- 'test/hil/**'
|
||||
- '.github/workflows/build_esp.yml'
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.run_id }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
build-esp:
|
||||
@ -14,22 +31,84 @@ jobs:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
board:
|
||||
# Alphabetical order
|
||||
# ESP32-S2
|
||||
- 'adafruit_metro_esp32s2'
|
||||
- 'espressif_saola_1'
|
||||
- 'espressif_kaluga_1'
|
||||
# ESP32-S3
|
||||
- 'espressif_addax_1'
|
||||
|
||||
- 'espressif_s3_devkitm'
|
||||
steps:
|
||||
- name: Setup Python
|
||||
uses: actions/setup-python@v2
|
||||
uses: actions/setup-python@v5
|
||||
with:
|
||||
python-version: '3.x'
|
||||
|
||||
- name: Pull ESP-IDF docker
|
||||
run: docker pull espressif/idf:latest
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v2
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Build
|
||||
run: docker run --rm -v $PWD:/project -w /project espressif/idf:latest python3 tools/build_esp32sx.py ${{ matrix.board }}
|
||||
run: docker run --rm -v $PWD:/project -w /project espressif/idf:v5.1.1 python3 tools/build_esp32.py ${{ matrix.board }}
|
||||
|
||||
- name: Upload Artifacts for Hardware Testing
|
||||
if: matrix.board == 'espressif_s3_devkitm' && github.repository_owner == 'hathach'
|
||||
uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: ${{ matrix.board }}
|
||||
path: |
|
||||
cmake-build/cmake-build-${{ matrix.board }}/*/*/bootloader/bootloader.bin
|
||||
cmake-build/cmake-build-${{ matrix.board }}/*/*/*.bin
|
||||
cmake-build/cmake-build-${{ matrix.board }}/*/*/partition_table/partition-table.bin
|
||||
cmake-build/cmake-build-${{ matrix.board }}/*/*/config.env
|
||||
cmake-build/cmake-build-${{ matrix.board }}/*/*/flash_args
|
||||
|
||||
# ---------------------------------------
|
||||
# Hardware in the loop (HIL)
|
||||
# Current self-hosted instance is running on an RPI4. For attached hardware checkout hil_pi4.json
|
||||
# ---------------------------------------
|
||||
hil-test:
|
||||
# run only with hathach's commit due to limited resource on RPI4
|
||||
if: github.repository_owner == 'hathach'
|
||||
needs: build-esp
|
||||
runs-on: [self-hosted, esp32s3, hardware-in-the-loop]
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
board:
|
||||
- 'espressif_s3_devkitm'
|
||||
steps:
|
||||
- name: Clean workspace
|
||||
run: |
|
||||
echo "Cleaning up previous run"
|
||||
rm -rf "${{ github.workspace }}"
|
||||
mkdir -p "${{ github.workspace }}"
|
||||
|
||||
# USB bus on rpi4 is not stable, reset it before testing
|
||||
- name: Reset USB bus
|
||||
run: |
|
||||
lsusb
|
||||
lsusb -t
|
||||
# reset VIA Labs 2.0 hub
|
||||
sudo usbreset 001/002
|
||||
|
||||
# legacy code
|
||||
#for port in $(lspci | grep USB | cut -d' ' -f1); do
|
||||
# echo -n "0000:${port}"| sudo tee /sys/bus/pci/drivers/xhci_hcd/unbind;
|
||||
# sleep 0.1;
|
||||
# echo -n "0000:${port}" | sudo tee /sys/bus/pci/drivers/xhci_hcd/bind;
|
||||
#done
|
||||
|
||||
- name: Checkout test/hil
|
||||
uses: actions/checkout@v4
|
||||
with:
|
||||
sparse-checkout: test/hil
|
||||
|
||||
- name: Download Artifacts
|
||||
uses: actions/download-artifact@v4
|
||||
with:
|
||||
name: ${{ matrix.board }}
|
||||
path: cmake-build/cmake-build-${{ matrix.board }}
|
||||
|
||||
- name: Test on actual hardware
|
||||
run: |
|
||||
python3 test/hil/hil_test.py --board ${{ matrix.board }} hil_pi4.json
|
||||
|
||||
59
.github/workflows/build_iar.yml
vendored
Normal file
59
.github/workflows/build_iar.yml
vendored
Normal file
@ -0,0 +1,59 @@
|
||||
name: Build IAR
|
||||
|
||||
on:
|
||||
workflow_dispatch:
|
||||
push:
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- 'tools/get_deps.py'
|
||||
- 'test/hil/**'
|
||||
- '.github/workflows/build_iar.yml'
|
||||
pull_request:
|
||||
branches: [ master ]
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- 'tools/get_deps.py'
|
||||
- 'test/hil/**'
|
||||
- '.github/workflows/build_iar.yml'
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.run_id }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
cmake:
|
||||
if: github.repository_owner == 'hathach'
|
||||
runs-on: [self-hosted, Linux, X64, hifiphile]
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
family:
|
||||
# Alphabetical order
|
||||
# Note: bundle multiple families into a matrix since there is only one self-hosted instance can
|
||||
# run IAR build. Too many matrix can hurt due to setup/teardown overhead.
|
||||
- 'lpc43 stm32f0 stm32f1 stm32f7 stm32g0 stm32g4 stm32l4'
|
||||
steps:
|
||||
- name: Clean workspace
|
||||
run: |
|
||||
echo "Cleaning up previous run"
|
||||
rm -rf "${{ github.workspace }}"
|
||||
mkdir -p "${{ github.workspace }}"
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Get Dependencies
|
||||
run: python3 tools/get_deps.py ${{ matrix.family }}
|
||||
|
||||
- name: Build
|
||||
run: python3 tools/build_cmake.py ${{ matrix.family }} -DTOOLCHAIN=iar
|
||||
|
||||
- name: Test on actual hardware (hardware in the loop)
|
||||
run: |
|
||||
python3 test/hil/hil_test.py hil_hfp.json
|
||||
50
.github/workflows/build_msp430.yml
vendored
50
.github/workflows/build_msp430.yml
vendored
@ -1,50 +0,0 @@
|
||||
name: Build MSP430
|
||||
|
||||
on:
|
||||
pull_request:
|
||||
push:
|
||||
release:
|
||||
types:
|
||||
- created
|
||||
|
||||
jobs:
|
||||
build-msp430:
|
||||
runs-on: ubuntu-latest
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
family:
|
||||
# Alphabetical order
|
||||
- 'msp430'
|
||||
steps:
|
||||
- name: Setup Python
|
||||
uses: actions/setup-python@v2
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v2
|
||||
|
||||
- name: Checkout common submodules in lib
|
||||
run: git submodule update --init lib/FreeRTOS-Kernel lib/lwip
|
||||
|
||||
- name: Set Toolchain URL
|
||||
run: echo >> $GITHUB_ENV TOOLCHAIN_URL=http://software-dl.ti.com/msp430/msp430_public_sw/mcu/msp430/MSPGCC/9_2_0_0/export/msp430-gcc-9.2.0.50_linux64.tar.bz2
|
||||
|
||||
- name: Cache Toolchain
|
||||
uses: actions/cache@v2
|
||||
id: cache-toolchain
|
||||
with:
|
||||
path: ~/cache/
|
||||
key: ${{ runner.os }}-21-03-04-${{ env.TOOLCHAIN_URL }}
|
||||
|
||||
- name: Install Toolchain
|
||||
if: steps.cache-toolchain.outputs.cache-hit != 'true'
|
||||
run: |
|
||||
mkdir -p ~/cache/toolchain
|
||||
wget --progress=dot:mega $TOOLCHAIN_URL -O toolchain.tar.bz2
|
||||
tar -C ~/cache/toolchain -xaf toolchain.tar.bz2
|
||||
|
||||
- name: Set Toolchain Path
|
||||
run: echo >> $GITHUB_PATH `echo ~/cache/toolchain/*/bin`
|
||||
|
||||
- name: Build
|
||||
run: python3 tools/build_family.py ${{ matrix.family }}
|
||||
43
.github/workflows/build_renesas.yml
vendored
43
.github/workflows/build_renesas.yml
vendored
@ -1,11 +1,28 @@
|
||||
name: Build Renesas
|
||||
|
||||
on:
|
||||
pull_request:
|
||||
workflow_dispatch:
|
||||
push:
|
||||
release:
|
||||
types:
|
||||
- created
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- 'tools/get_deps.py'
|
||||
- '.github/workflows/build_renesas.yml'
|
||||
pull_request:
|
||||
branches: [ master ]
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- 'tools/get_deps.py'
|
||||
- '.github/workflows/build_renesas.yml'
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.run_id }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
build-rx:
|
||||
@ -15,22 +32,21 @@ jobs:
|
||||
matrix:
|
||||
family:
|
||||
# Alphabetical order
|
||||
- 'rx63n'
|
||||
- 'rx'
|
||||
steps:
|
||||
- name: Setup Python
|
||||
uses: actions/setup-python@v2
|
||||
uses: actions/setup-python@v5
|
||||
with:
|
||||
python-version: '3.x'
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v2
|
||||
|
||||
- name: Checkout common submodules in lib
|
||||
run: git submodule update --init lib/FreeRTOS-Kernel lib/lwip
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Set Toolchain URL
|
||||
run: echo >> $GITHUB_ENV TOOLCHAIN_URL=http://gcc-renesas.com/downloads/get.php?f=rx/8.3.0.202004-gnurx/gcc-8.3.0.202004-GNURX-ELF.run
|
||||
|
||||
- name: Cache Toolchain
|
||||
uses: actions/cache@v2
|
||||
uses: actions/cache@v4
|
||||
id: cache-toolchain
|
||||
with:
|
||||
path: ~/cache/
|
||||
@ -47,5 +63,8 @@ jobs:
|
||||
- name: Set Toolchain Path
|
||||
run: echo >> $GITHUB_PATH `echo ~/cache/toolchain/*/bin`
|
||||
|
||||
- name: Get Dependencies
|
||||
run: python3 tools/get_deps.py ${{ matrix.family }}
|
||||
|
||||
- name: Build
|
||||
run: python3 tools/build_family.py ${{ matrix.family }}
|
||||
run: python3 tools/build_make.py ${{ matrix.family }}
|
||||
|
||||
43
.github/workflows/build_riscv.yml
vendored
43
.github/workflows/build_riscv.yml
vendored
@ -1,11 +1,28 @@
|
||||
name: Build RISC-V
|
||||
|
||||
on:
|
||||
pull_request:
|
||||
workflow_dispatch:
|
||||
push:
|
||||
release:
|
||||
types:
|
||||
- created
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- 'tools/get_deps.py'
|
||||
- '.github/workflows/build_riscv.yml'
|
||||
pull_request:
|
||||
branches: [ master ]
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- 'tools/get_deps.py'
|
||||
- '.github/workflows/build_riscv.yml'
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.run_id }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
build-riscv:
|
||||
@ -15,22 +32,23 @@ jobs:
|
||||
matrix:
|
||||
family:
|
||||
# Alphabetical order
|
||||
- 'ch32v307'
|
||||
- 'fomu'
|
||||
- 'gd32vf103'
|
||||
steps:
|
||||
- name: Setup Python
|
||||
uses: actions/setup-python@v2
|
||||
uses: actions/setup-python@v5
|
||||
with:
|
||||
python-version: '3.x'
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v2
|
||||
|
||||
- name: Checkout common submodules in lib
|
||||
run: git submodule update --init lib/FreeRTOS-Kernel lib/lwip
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Set Toolchain URL
|
||||
run: echo >> $GITHUB_ENV TOOLCHAIN_URL=https://github.com/xpack-dev-tools/riscv-none-embed-gcc-xpack/releases/download/v10.1.0-1.1/xpack-riscv-none-embed-gcc-10.1.0-1.1-linux-x64.tar.gz
|
||||
|
||||
- name: Cache Toolchain
|
||||
uses: actions/cache@v2
|
||||
uses: actions/cache@v4
|
||||
id: cache-toolchain
|
||||
with:
|
||||
path: ~/cache/
|
||||
@ -46,5 +64,8 @@ jobs:
|
||||
- name: Set Toolchain Path
|
||||
run: echo >> $GITHUB_PATH `echo ~/cache/toolchain/*/bin`
|
||||
|
||||
- name: Get Dependencies
|
||||
run: python3 tools/get_deps.py ${{ matrix.family }}
|
||||
|
||||
- name: Build
|
||||
run: python3 tools/build_family.py ${{ matrix.family }}
|
||||
run: python3 tools/build_make.py ${{ matrix.family }}
|
||||
|
||||
54
.github/workflows/build_win_mac.yml
vendored
Normal file
54
.github/workflows/build_win_mac.yml
vendored
Normal file
@ -0,0 +1,54 @@
|
||||
name: Build Windows/MacOS
|
||||
|
||||
on:
|
||||
workflow_dispatch:
|
||||
push:
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- '.github/workflows/build_win_mac.yml'
|
||||
pull_request:
|
||||
branches: [ master ]
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- '.github/workflows/build_win_mac.yml'
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.run_id }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
# ---------------------------------------
|
||||
# Build ARM family
|
||||
# ---------------------------------------
|
||||
build-arm:
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
os: [windows-latest, macos-latest]
|
||||
runs-on: ${{ matrix.os }}
|
||||
|
||||
steps:
|
||||
- name: Setup Python
|
||||
uses: actions/setup-python@v5
|
||||
with:
|
||||
python-version: '3.x'
|
||||
|
||||
- name: Install ARM GCC
|
||||
uses: carlosperate/arm-none-eabi-gcc-action@v1
|
||||
with:
|
||||
release: '10.3-2021.10'
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Get Dependencies
|
||||
run: python3 tools/get_deps.py stm32f4
|
||||
|
||||
- name: Build
|
||||
run: python3 tools/build_make.py stm32f4 stm32f411disco
|
||||
34
.github/workflows/cifuzz.yml
vendored
Normal file
34
.github/workflows/cifuzz.yml
vendored
Normal file
@ -0,0 +1,34 @@
|
||||
name: CIFuzz
|
||||
on:
|
||||
workflow_dispatch:
|
||||
pull_request:
|
||||
branches:
|
||||
- master
|
||||
paths:
|
||||
- '**.c'
|
||||
- '**.cc'
|
||||
- '**.cpp'
|
||||
- '**.cxx'
|
||||
- '**.h'
|
||||
jobs:
|
||||
Fuzzing:
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- name: Build Fuzzers
|
||||
id: build
|
||||
uses: google/oss-fuzz/infra/cifuzz/actions/build_fuzzers@master
|
||||
with:
|
||||
oss-fuzz-project-name: 'tinyusb'
|
||||
language: c++
|
||||
- name: Run Fuzzers
|
||||
uses: google/oss-fuzz/infra/cifuzz/actions/run_fuzzers@master
|
||||
with:
|
||||
oss-fuzz-project-name: 'tinyusb'
|
||||
language: c++
|
||||
fuzz-seconds: 600
|
||||
- name: Upload Crash
|
||||
uses: actions/upload-artifact@v4
|
||||
if: failure() && steps.build.outcome == 'success'
|
||||
with:
|
||||
name: artifacts
|
||||
path: ./out/artifacts
|
||||
5
.github/workflows/codeql-buildscript.sh
vendored
Normal file
5
.github/workflows/codeql-buildscript.sh
vendored
Normal file
@ -0,0 +1,5 @@
|
||||
#!/usr/bin/env bash
|
||||
|
||||
FAMILY=stm32l4
|
||||
python3 tools/get_deps.py $FAMILY
|
||||
python3 tools/build_make.py $FAMILY
|
||||
137
.github/workflows/codeql.yml
vendored
Normal file
137
.github/workflows/codeql.yml
vendored
Normal file
@ -0,0 +1,137 @@
|
||||
# For most projects, this workflow file will not need changing; you simply need
|
||||
# to commit it to your repository.
|
||||
#
|
||||
# You may wish to alter this file to override the set of languages analyzed,
|
||||
# or to provide custom queries or build logic.
|
||||
#
|
||||
# ******** NOTE ********
|
||||
# We have attempted to detect the languages in your repository. Please check
|
||||
# the `language` matrix defined below to confirm you have the correct set of
|
||||
# supported CodeQL languages.
|
||||
#
|
||||
name: "CodeQL"
|
||||
|
||||
on:
|
||||
push:
|
||||
branches: [ 'master' ]
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- '.github/workflows/codeql.yml'
|
||||
pull_request:
|
||||
branches: [ 'master' ]
|
||||
paths:
|
||||
- 'src/**'
|
||||
- 'examples/**'
|
||||
- 'lib/**'
|
||||
- 'hw/**'
|
||||
- '.github/workflows/codeql.yml'
|
||||
schedule:
|
||||
- cron: '0 0 * * *'
|
||||
|
||||
jobs:
|
||||
analyze:
|
||||
name: Analyze
|
||||
# Runner size impacts CodeQL analysis time. To learn more, please see:
|
||||
# - https://gh.io/recommended-hardware-resources-for-running-codeql
|
||||
# - https://gh.io/supported-runners-and-hardware-resources
|
||||
# - https://gh.io/using-larger-runners
|
||||
# Consider using larger runners for possible analysis time improvements.
|
||||
runs-on: ubuntu-latest
|
||||
timeout-minutes: 360
|
||||
permissions:
|
||||
actions: read
|
||||
contents: read
|
||||
security-events: write
|
||||
|
||||
strategy:
|
||||
fail-fast: false
|
||||
matrix:
|
||||
language: [ 'c-cpp' ]
|
||||
# CodeQL supports [ 'c-cpp', 'csharp', 'go', 'java-kotlin', 'javascript-typescript', 'python', 'ruby', 'swift' ]
|
||||
# Use only 'java-kotlin' to analyze code written in Java, Kotlin or both
|
||||
# Use only 'javascript-typescript' to analyze code written in JavaScript, TypeScript or both
|
||||
# Learn more about CodeQL language support at https://aka.ms/codeql-docs/language-support
|
||||
|
||||
steps:
|
||||
- name: Checkout repository
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Install ARM GCC
|
||||
uses: carlosperate/arm-none-eabi-gcc-action@v1
|
||||
with:
|
||||
release: '11.2-2022.02'
|
||||
|
||||
# Initializes the CodeQL tools for scanning.
|
||||
- name: Initialize CodeQL
|
||||
uses: github/codeql-action/init@v2
|
||||
with:
|
||||
languages: ${{ matrix.language }}
|
||||
# If you wish to specify custom queries, you can do so here or in a config file.
|
||||
# By default, queries listed here will override any specified in a config file.
|
||||
# Prefix the list here with "+" to use these queries and those in the config file.
|
||||
|
||||
# For more details on CodeQL's query packs, refer to: https://docs.github.com/en/code-security/code-scanning/automatically-scanning-your-code-for-vulnerabilities-and-errors/configuring-code-scanning#using-queries-in-ql-packs
|
||||
# queries: security-extended,security-and-quality
|
||||
queries: security-and-quality
|
||||
|
||||
|
||||
# Autobuild attempts to build any compiled languages (C/C++, C#, Go, Java, or Swift).
|
||||
# If this step fails, then you should remove it and run the build manually (see below)
|
||||
#- name: Autobuild
|
||||
# uses: github/codeql-action/autobuild@v2
|
||||
|
||||
# ℹ️ Command-line programs to run using the OS shell.
|
||||
# 📚 See https://docs.github.com/en/actions/using-workflows/workflow-syntax-for-github-actions#jobsjob_idstepsrun
|
||||
|
||||
# If the Autobuild fails above, remove it and uncomment the following three lines.
|
||||
# modify them (or add more) to build your code if your project, please refer to the EXAMPLE below for guidance.
|
||||
|
||||
- run: |
|
||||
./.github/workflows/codeql-buildscript.sh
|
||||
|
||||
- name: Perform CodeQL Analysis
|
||||
uses: github/codeql-action/analyze@v2
|
||||
with:
|
||||
category: "/language:${{matrix.language}}"
|
||||
upload: false
|
||||
id: step1
|
||||
|
||||
# Filter out rules with low severity or high false positive rate
|
||||
# Also filter out warnings in third-party code
|
||||
- name: Filter out unwanted errors and warnings
|
||||
uses: advanced-security/filter-sarif@v1
|
||||
with:
|
||||
patterns: |
|
||||
-**:cpp/path-injection
|
||||
-**:cpp/world-writable-file-creation
|
||||
-**:cpp/poorly-documented-function
|
||||
-**:cpp/potentially-dangerous-function
|
||||
-**:cpp/use-of-goto
|
||||
-**:cpp/integer-multiplication-cast-to-long
|
||||
-**:cpp/comparison-with-wider-type
|
||||
-**:cpp/leap-year/*
|
||||
-**:cpp/ambiguously-signed-bit-field
|
||||
-**:cpp/suspicious-pointer-scaling
|
||||
-**:cpp/suspicious-pointer-scaling-void
|
||||
-**:cpp/unsigned-comparison-zero
|
||||
-**/third*party/**
|
||||
-**/3rd*party/**
|
||||
-**/external/**
|
||||
input: ${{ steps.step1.outputs.sarif-output }}/cpp.sarif
|
||||
output: ${{ steps.step1.outputs.sarif-output }}/cpp.sarif
|
||||
|
||||
- name: Upload SARIF
|
||||
uses: github/codeql-action/upload-sarif@v2
|
||||
with:
|
||||
sarif_file: ${{ steps.step1.outputs.sarif-output }}
|
||||
category: "/language:${{matrix.language}}"
|
||||
|
||||
- name: Archive CodeQL results
|
||||
uses: actions/upload-artifact@v4
|
||||
with:
|
||||
name: codeql-results
|
||||
path: ${{ steps.step1.outputs.sarif-output }}
|
||||
retention-days: 5
|
||||
34
.github/workflows/fail_on_error.py
vendored
Executable file
34
.github/workflows/fail_on_error.py
vendored
Executable file
@ -0,0 +1,34 @@
|
||||
#!/usr/bin/env python3
|
||||
|
||||
import json
|
||||
import sys
|
||||
|
||||
# Return whether SARIF file contains error-level results
|
||||
def codeql_sarif_contain_error(filename):
|
||||
with open(filename, 'r') as f:
|
||||
s = json.load(f)
|
||||
|
||||
for run in s.get('runs', []):
|
||||
rules_metadata = run['tool']['driver']['rules']
|
||||
if not rules_metadata:
|
||||
rules_metadata = run['tool']['extensions'][0]['rules']
|
||||
|
||||
for res in run.get('results', []):
|
||||
if 'ruleIndex' in res:
|
||||
rule_index = res['ruleIndex']
|
||||
elif 'rule' in res and 'index' in res['rule']:
|
||||
rule_index = res['rule']['index']
|
||||
else:
|
||||
continue
|
||||
try:
|
||||
rule_level = rules_metadata[rule_index]['defaultConfiguration']['level']
|
||||
except IndexError as e:
|
||||
print(e, rule_index, len(rules_metadata))
|
||||
else:
|
||||
if rule_level == 'error':
|
||||
return True
|
||||
return False
|
||||
|
||||
if __name__ == "__main__":
|
||||
if codeql_sarif_contain_error(sys.argv[1]):
|
||||
sys.exit(1)
|
||||
73
.github/workflows/labeler.yml
vendored
Normal file
73
.github/workflows/labeler.yml
vendored
Normal file
@ -0,0 +1,73 @@
|
||||
name: Labeler
|
||||
|
||||
on:
|
||||
issues:
|
||||
types: [opened]
|
||||
pull_request_target:
|
||||
types: [opened]
|
||||
|
||||
jobs:
|
||||
label-priority:
|
||||
runs-on: ubuntu-latest
|
||||
permissions:
|
||||
issues: write
|
||||
pull-requests: write
|
||||
steps:
|
||||
- name: Label New Issue or PR
|
||||
uses: actions/github-script@v7
|
||||
with:
|
||||
github-token: ${{ secrets.GITHUB_TOKEN }}
|
||||
script: |
|
||||
let label = '';
|
||||
let username = '';
|
||||
let issueOrPrNumber = 0;
|
||||
|
||||
if (context.eventName === 'issues') {
|
||||
username = context.payload.issue.user.login;
|
||||
issueOrPrNumber = context.payload.issue.number;
|
||||
} else if (context.eventName === 'pull_request_target') {
|
||||
username = context.payload.pull_request.user.login;
|
||||
issueOrPrNumber = context.payload.pull_request.number;
|
||||
}
|
||||
|
||||
// Check if an Adafruit member
|
||||
try {
|
||||
const adafruitResponse = await github.rest.orgs.checkMembershipForUser({
|
||||
org: 'adafruit',
|
||||
username: username
|
||||
});
|
||||
|
||||
if (adafruitResponse.status === 204) {
|
||||
console.log('Adafruit Member');
|
||||
label = 'Prio Urgent';
|
||||
}
|
||||
} catch (error) {
|
||||
console.log('Not an Adafruit member');
|
||||
}
|
||||
|
||||
// Check if a contributor
|
||||
if (label == '') {
|
||||
try {
|
||||
const collaboratorResponse = await github.rest.repos.checkCollaborator({
|
||||
owner: context.repo.owner,
|
||||
repo: context.repo.repo,
|
||||
username: username
|
||||
});
|
||||
|
||||
if (collaboratorResponse.status === 204) {
|
||||
console.log('Contributor');
|
||||
label = 'Prio Higher';
|
||||
}
|
||||
} catch (error) {
|
||||
console.log('Not a contributor');
|
||||
}
|
||||
}
|
||||
|
||||
if (label !== '') {
|
||||
await github.rest.issues.addLabels({
|
||||
owner: context.repo.owner,
|
||||
repo: context.repo.repo,
|
||||
issue_number: issueOrPrNumber,
|
||||
labels: [label]
|
||||
});
|
||||
}
|
||||
48
.github/workflows/pre-commit.yml
vendored
Normal file
48
.github/workflows/pre-commit.yml
vendored
Normal file
@ -0,0 +1,48 @@
|
||||
name: pre-commit
|
||||
|
||||
on:
|
||||
workflow_dispatch:
|
||||
push:
|
||||
pull_request:
|
||||
branches: [ master ]
|
||||
|
||||
concurrency:
|
||||
group: ${{ github.workflow }}-${{ github.head_ref || github.run_id }}
|
||||
cancel-in-progress: true
|
||||
|
||||
jobs:
|
||||
pre-commit:
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- name: Setup Python
|
||||
uses: actions/setup-python@v5
|
||||
with:
|
||||
python-version: '3.x'
|
||||
|
||||
- name: Setup Ruby
|
||||
uses: ruby/setup-ruby@v1
|
||||
with:
|
||||
ruby-version: '3.0'
|
||||
|
||||
- name: Checkout TinyUSB
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Get Dependencies
|
||||
run: |
|
||||
gem install ceedling
|
||||
#cd test/unit-test
|
||||
#ceedling test:all
|
||||
|
||||
- name: Run pre-commit
|
||||
uses: pre-commit/action@v3.0.0
|
||||
|
||||
- name: Build Fuzzer
|
||||
run: |
|
||||
export CC=clang
|
||||
export CXX=clang++
|
||||
fuzz_harness=$(ls -d test/fuzz/device/*/)
|
||||
for h in $fuzz_harness
|
||||
do
|
||||
make -C $h get-deps
|
||||
make -C $h all
|
||||
done
|
||||
10
.github/workflows/trigger.yml
vendored
10
.github/workflows/trigger.yml
vendored
@ -1,6 +1,7 @@
|
||||
name: Trigger Repos
|
||||
|
||||
on:
|
||||
workflow_dispatch:
|
||||
push:
|
||||
branches: master
|
||||
release:
|
||||
@ -22,7 +23,7 @@ jobs:
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- name: Checkout code
|
||||
uses: actions/checkout@v2
|
||||
uses: actions/checkout@v4
|
||||
|
||||
- name: Push to tinyusb_src
|
||||
run: |
|
||||
@ -43,7 +44,7 @@ jobs:
|
||||
if [ -n "$(git status --porcelain)" ]; then
|
||||
git add .
|
||||
git commit --message "Update from https://github.com/$GITHUB_REPOSITORY/commit/$GITHUB_SHA"
|
||||
git push
|
||||
git push
|
||||
fi
|
||||
|
||||
- name: Create tinyusb_src Release
|
||||
@ -53,6 +54,7 @@ jobs:
|
||||
cd tinyusb_src
|
||||
git tag ${{ github.event.release.tag_name }}
|
||||
git push origin ${{ github.event.release.tag_name }}
|
||||
|
||||
|
||||
# Send POST reqwuest to release https://docs.github.com/en/rest/reference/repos#create-a-release
|
||||
curl -X POST -H "Authorization: token ${{ secrets.API_TOKEN_GITHUB }}" -H "Accept: application/vnd.github.v3+json" --data '{"tag_name": "${{ github.event.release.tag_name }}", "name": "${{ github.event.release.name }}", "body": "${{ github.event.release.body }}", "draft": ${{ github.event.release.draft }}, "prerelease": ${{ github.event.release.prerelease }}}' https://api.github.com/repos/hathach/tinyusb_src/releases
|
||||
bb="For release note, please checkout https://github.com/hathach/tinyusb/releases/tag/${{ github.event.release.tag_name }}"
|
||||
curl -X POST -H "Authorization: token ${{ secrets.API_TOKEN_GITHUB }}" -H "Accept: application/vnd.github.v3+json" --data '{"tag_name": "${{ github.event.release.tag_name }}", "name": "${{ github.event.release.name }}", "body": "$bb", "draft": ${{ github.event.release.draft }}, "prerelease": ${{ github.event.release.prerelease }}}' https://api.github.com/repos/hathach/tinyusb_src/releases
|
||||
|
||||
65
.gitignore
vendored
65
.gitignore
vendored
@ -12,7 +12,7 @@ latex
|
||||
*.ind
|
||||
.env
|
||||
.settings/
|
||||
.idea/
|
||||
.vscode/
|
||||
.gdb_history
|
||||
/examples/*/*/build*
|
||||
test_old/
|
||||
@ -21,8 +21,71 @@ _build
|
||||
/examples/*/*/ses
|
||||
/examples/*/*/ozone
|
||||
/examples/obsolete
|
||||
hw/bsp/**/cubemx/*/
|
||||
.mxproject
|
||||
# coverity intermediate files
|
||||
cov-int
|
||||
# cppcheck build directories
|
||||
*-build-dir
|
||||
/_bin/
|
||||
__pycache__
|
||||
cmake-build-*
|
||||
sdkconfig
|
||||
|
||||
# submodules
|
||||
hw/mcu/allwinner
|
||||
hw/mcu/bridgetek/ft9xx/ft90x-sdk
|
||||
hw/mcu/broadcom
|
||||
hw/mcu/gd/nuclei-sdk
|
||||
hw/mcu/infineon/mtb-xmclib-cat3
|
||||
hw/mcu/microchip
|
||||
hw/mcu/mindmotion/mm32sdk
|
||||
hw/mcu/nordic/nrfx
|
||||
hw/mcu/nuvoton
|
||||
hw/mcu/nxp/lpcopen
|
||||
hw/mcu/nxp/mcux-sdk
|
||||
hw/mcu/nxp/nxp_sdk
|
||||
hw/mcu/raspberry_pi/Pico-PIO-USB
|
||||
hw/mcu/renesas/rx
|
||||
hw/mcu/silabs/cmsis-dfp-efm32gg12b
|
||||
hw/mcu/sony/cxd56/spresense-exported-sdk
|
||||
hw/mcu/st/cmsis_device_f0
|
||||
hw/mcu/st/cmsis_device_f1
|
||||
hw/mcu/st/cmsis_device_f2
|
||||
hw/mcu/st/cmsis_device_f3
|
||||
hw/mcu/st/cmsis_device_f4
|
||||
hw/mcu/st/cmsis_device_f7
|
||||
hw/mcu/st/cmsis_device_g0
|
||||
hw/mcu/st/cmsis_device_g4
|
||||
hw/mcu/st/cmsis_device_h5
|
||||
hw/mcu/st/cmsis_device_h7
|
||||
hw/mcu/st/cmsis_device_l0
|
||||
hw/mcu/st/cmsis_device_l1
|
||||
hw/mcu/st/cmsis_device_l4
|
||||
hw/mcu/st/cmsis_device_l5
|
||||
hw/mcu/st/cmsis_device_u5
|
||||
hw/mcu/st/cmsis_device_wb
|
||||
hw/mcu/st/stm32f0xx_hal_driver
|
||||
hw/mcu/st/stm32f1xx_hal_driver
|
||||
hw/mcu/st/stm32f2xx_hal_driver
|
||||
hw/mcu/st/stm32f3xx_hal_driver
|
||||
hw/mcu/st/stm32f4xx_hal_driver
|
||||
hw/mcu/st/stm32f7xx_hal_driver
|
||||
hw/mcu/st/stm32g0xx_hal_driver
|
||||
hw/mcu/st/stm32g4xx_hal_driver
|
||||
hw/mcu/st/stm32h5xx_hal_driver
|
||||
hw/mcu/st/stm32h7xx_hal_driver
|
||||
hw/mcu/st/stm32l0xx_hal_driver
|
||||
hw/mcu/st/stm32l1xx_hal_driver
|
||||
hw/mcu/st/stm32l4xx_hal_driver
|
||||
hw/mcu/st/stm32l5xx_hal_driver
|
||||
hw/mcu/st/stm32u5xx_hal_driver
|
||||
hw/mcu/st/stm32wbxx_hal_driver
|
||||
hw/mcu/ti
|
||||
hw/mcu/wch/ch32v307
|
||||
hw/mcu/wch/ch32f20x
|
||||
lib/CMSIS_5
|
||||
lib/FreeRTOS-Kernel
|
||||
lib/lwip
|
||||
lib/sct_neopixel
|
||||
tools/uf2
|
||||
|
||||
123
.gitmodules
vendored
123
.gitmodules
vendored
@ -1,123 +0,0 @@
|
||||
[submodule "hw/mcu/nordic/nrfx"]
|
||||
path = hw/mcu/nordic/nrfx
|
||||
url = https://github.com/NordicSemiconductor/nrfx.git
|
||||
[submodule "tools/uf2"]
|
||||
path = tools/uf2
|
||||
url = https://github.com/microsoft/uf2.git
|
||||
[submodule "hw/mcu/sony/cxd56/spresense-exported-sdk"]
|
||||
path = hw/mcu/sony/cxd56/spresense-exported-sdk
|
||||
url = https://github.com/sonydevworld/spresense-exported-sdk.git
|
||||
[submodule "hw/mcu/ti"]
|
||||
path = hw/mcu/ti
|
||||
url = https://github.com/hathach/ti_driver.git
|
||||
[submodule "hw/mcu/microchip"]
|
||||
path = hw/mcu/microchip
|
||||
url = https://github.com/hathach/microchip_driver.git
|
||||
[submodule "hw/mcu/nuvoton"]
|
||||
path = hw/mcu/nuvoton
|
||||
url = https://github.com/majbthrd/nuc_driver.git
|
||||
[submodule "lib/lwip"]
|
||||
path = lib/lwip
|
||||
url = https://github.com/lwip-tcpip/lwip.git
|
||||
[submodule "hw/mcu/st/cmsis_device_f4"]
|
||||
path = hw/mcu/st/cmsis_device_f4
|
||||
url = https://github.com/STMicroelectronics/cmsis_device_f4.git
|
||||
[submodule "hw/mcu/st/stm32f4xx_hal_driver"]
|
||||
path = hw/mcu/st/stm32f4xx_hal_driver
|
||||
url = https://github.com/STMicroelectronics/stm32f4xx_hal_driver.git
|
||||
[submodule "hw/mcu/st/cmsis_device_f0"]
|
||||
path = hw/mcu/st/cmsis_device_f0
|
||||
url = https://github.com/STMicroelectronics/cmsis_device_f0.git
|
||||
[submodule "hw/mcu/st/stm32f0xx_hal_driver"]
|
||||
path = hw/mcu/st/stm32f0xx_hal_driver
|
||||
url = https://github.com/STMicroelectronics/stm32f0xx_hal_driver.git
|
||||
[submodule "hw/mcu/st/cmsis_device_f1"]
|
||||
path = hw/mcu/st/cmsis_device_f1
|
||||
url = https://github.com/STMicroelectronics/cmsis_device_f1.git
|
||||
[submodule "hw/mcu/st/stm32f1xx_hal_driver"]
|
||||
path = hw/mcu/st/stm32f1xx_hal_driver
|
||||
url = https://github.com/STMicroelectronics/stm32f1xx_hal_driver.git
|
||||
[submodule "hw/mcu/st/cmsis_device_f2"]
|
||||
path = hw/mcu/st/cmsis_device_f2
|
||||
url = https://github.com/STMicroelectronics/cmsis_device_f2.git
|
||||
[submodule "hw/mcu/st/stm32f2xx_hal_driver"]
|
||||
path = hw/mcu/st/stm32f2xx_hal_driver
|
||||
url = https://github.com/STMicroelectronics/stm32f2xx_hal_driver.git
|
||||
[submodule "hw/mcu/st/cmsis_device_f3"]
|
||||
path = hw/mcu/st/cmsis_device_f3
|
||||
url = https://github.com/STMicroelectronics/cmsis_device_f3.git
|
||||
[submodule "hw/mcu/st/stm32f3xx_hal_driver"]
|
||||
path = hw/mcu/st/stm32f3xx_hal_driver
|
||||
url = https://github.com/STMicroelectronics/stm32f3xx_hal_driver.git
|
||||
[submodule "hw/mcu/st/cmsis_device_f7"]
|
||||
path = hw/mcu/st/cmsis_device_f7
|
||||
url = https://github.com/STMicroelectronics/cmsis_device_f7.git
|
||||
[submodule "hw/mcu/st/stm32f7xx_hal_driver"]
|
||||
path = hw/mcu/st/stm32f7xx_hal_driver
|
||||
url = https://github.com/STMicroelectronics/stm32f7xx_hal_driver.git
|
||||
[submodule "hw/mcu/st/cmsis_device_h7"]
|
||||
path = hw/mcu/st/cmsis_device_h7
|
||||
url = https://github.com/STMicroelectronics/cmsis_device_h7.git
|
||||
[submodule "hw/mcu/st/stm32h7xx_hal_driver"]
|
||||
path = hw/mcu/st/stm32h7xx_hal_driver
|
||||
url = https://github.com/STMicroelectronics/stm32h7xx_hal_driver.git
|
||||
[submodule "hw/mcu/st/cmsis_device_l0"]
|
||||
path = hw/mcu/st/cmsis_device_l0
|
||||
url = https://github.com/STMicroelectronics/cmsis_device_l0.git
|
||||
[submodule "hw/mcu/st/stm32l0xx_hal_driver"]
|
||||
path = hw/mcu/st/stm32l0xx_hal_driver
|
||||
url = https://github.com/STMicroelectronics/stm32l0xx_hal_driver.git
|
||||
[submodule "hw/mcu/st/cmsis_device_l1"]
|
||||
path = hw/mcu/st/cmsis_device_l1
|
||||
url = https://github.com/STMicroelectronics/cmsis_device_l1.git
|
||||
[submodule "hw/mcu/st/stm32l1xx_hal_driver"]
|
||||
path = hw/mcu/st/stm32l1xx_hal_driver
|
||||
url = https://github.com/STMicroelectronics/stm32l1xx_hal_driver.git
|
||||
[submodule "hw/mcu/st/cmsis_device_l4"]
|
||||
path = hw/mcu/st/cmsis_device_l4
|
||||
url = https://github.com/STMicroelectronics/cmsis_device_l4.git
|
||||
[submodule "hw/mcu/st/stm32l4xx_hal_driver"]
|
||||
path = hw/mcu/st/stm32l4xx_hal_driver
|
||||
url = https://github.com/STMicroelectronics/stm32l4xx_hal_driver.git
|
||||
[submodule "hw/mcu/st/cmsis_device_g0"]
|
||||
path = hw/mcu/st/cmsis_device_g0
|
||||
url = https://github.com/STMicroelectronics/cmsis_device_g0.git
|
||||
[submodule "hw/mcu/st/stm32g0xx_hal_driver"]
|
||||
path = hw/mcu/st/stm32g0xx_hal_driver
|
||||
url = https://github.com/STMicroelectronics/stm32g0xx_hal_driver.git
|
||||
[submodule "hw/mcu/st/cmsis_device_g4"]
|
||||
path = hw/mcu/st/cmsis_device_g4
|
||||
url = https://github.com/STMicroelectronics/cmsis_device_g4.git
|
||||
[submodule "hw/mcu/st/stm32g4xx_hal_driver"]
|
||||
path = hw/mcu/st/stm32g4xx_hal_driver
|
||||
url = https://github.com/STMicroelectronics/stm32g4xx_hal_driver.git
|
||||
[submodule "hw/mcu/st/cmsis_device_l5"]
|
||||
path = hw/mcu/st/cmsis_device_l5
|
||||
url = https://github.com/STMicroelectronics/cmsis_device_l5.git
|
||||
[submodule "hw/mcu/st/stm32l5xx_hal_driver"]
|
||||
path = hw/mcu/st/stm32l5xx_hal_driver
|
||||
url = https://github.com/STMicroelectronics/stm32l5xx_hal_driver.git
|
||||
[submodule "lib/sct_neopixel"]
|
||||
path = lib/sct_neopixel
|
||||
url = https://github.com/gsteiert/sct_neopixel
|
||||
[submodule "lib/FreeRTOS-Kernel"]
|
||||
path = lib/FreeRTOS-Kernel
|
||||
url = https://github.com/FreeRTOS/FreeRTOS-Kernel.git
|
||||
[submodule "lib/CMSIS_5"]
|
||||
path = lib/CMSIS_5
|
||||
url = https://github.com/ARM-software/CMSIS_5.git
|
||||
[submodule "hw/mcu/silabs/cmsis-dfp-efm32gg12b"]
|
||||
path = hw/mcu/silabs/cmsis-dfp-efm32gg12b
|
||||
url = https://github.com/cmsis-packs/cmsis-dfp-efm32gg12b
|
||||
[submodule "hw/mcu/renesas/rx"]
|
||||
path = hw/mcu/renesas/rx
|
||||
url = https://github.com/kkitayam/rx_device.git
|
||||
[submodule "hw/mcu/nxp/lpcopen"]
|
||||
path = hw/mcu/nxp/lpcopen
|
||||
url = https://github.com/hathach/nxp_lpcopen.git
|
||||
[submodule "hw/mcu/nxp/mcux-sdk"]
|
||||
path = hw/mcu/nxp/mcux-sdk
|
||||
url = https://github.com/NXPmicro/mcux-sdk.git
|
||||
[submodule "hw/mcu/nxp/nxp_sdk"]
|
||||
path = hw/mcu/nxp/nxp_sdk
|
||||
url = https://github.com/hathach/nxp_sdk.git
|
||||
10
.idea/.gitignore
generated
vendored
Normal file
10
.idea/.gitignore
generated
vendored
Normal file
@ -0,0 +1,10 @@
|
||||
# Default ignored files
|
||||
/shelf/
|
||||
/workspace.xml
|
||||
# Datasource local storage ignored files
|
||||
/dataSources/
|
||||
/dataSources.local.xml
|
||||
# Editor-based HTTP Client requests
|
||||
/httpRequests/
|
||||
# GitHub Copilot persisted chat sessions
|
||||
/copilot/chatSessions
|
||||
131
.idea/cmake.xml
generated
Normal file
131
.idea/cmake.xml
generated
Normal file
@ -0,0 +1,131 @@
|
||||
<?xml version="1.0" encoding="UTF-8"?>
|
||||
<project version="4">
|
||||
<component name="CMakeSharedSettings">
|
||||
<configurations>
|
||||
<configuration PROFILE_NAME="pico" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=raspberry_pi_pico -DLOG=1" />
|
||||
<configuration PROFILE_NAME="feather_rp2040" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=pico_sdk -DPICO_BOARD=adafruit_feather_rp2040 -DLOG=2" />
|
||||
<configuration PROFILE_NAME="feather_rp2040_max3421" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=feather_rp2040_max3421 -DLOG=2" />
|
||||
<configuration PROFILE_NAME="metro_rp2040" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=pico_sdk -DPICO_BOARD=adafruit_metro_rp2040 -DLOG=2 -DMAX3421_HOST=1" />
|
||||
<configuration PROFILE_NAME="feather esp32s2" ENABLED="false" TOOLCHAIN_NAME="ESP-IDF" GENERATION_OPTIONS="-DBOARD=adafruit_feather_esp32s2 -DMAX3421_HOST=1 -DLOG=2">
|
||||
<ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
<envs>
|
||||
<env name="ESPBAUD" value="1500000" />
|
||||
</envs>
|
||||
</ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
</configuration>
|
||||
<configuration PROFILE_NAME="metro esp32s2" ENABLED="false" TOOLCHAIN_NAME="ESP-IDF" GENERATION_OPTIONS="-DBOARD=adafruit_metro_esp32s2 -DMAX3421_HOST=1 -DLOG=2">
|
||||
<ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
<envs>
|
||||
<env name="ESPBAUD" value="1500000" />
|
||||
</envs>
|
||||
</ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
</configuration>
|
||||
<configuration PROFILE_NAME="kaluga" ENABLED="false" TOOLCHAIN_NAME="ESP-IDF" GENERATION_OPTIONS="-DBOARD=espressif_kaluga_1 -DMAX3421_HOST=1 -DLOG=2">
|
||||
<ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
<envs>
|
||||
<env name="ESPBAUD" value="1500000" />
|
||||
</envs>
|
||||
</ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
</configuration>
|
||||
<configuration PROFILE_NAME="feather esp32s3" ENABLED="false" TOOLCHAIN_NAME="ESP-IDF" GENERATION_OPTIONS="-DBOARD=adafruit_feather_esp32s3 -DMAX3421_HOST=1 -DLOG=2">
|
||||
<ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
<envs>
|
||||
<env name="ESPBAUD" value="1500000" />
|
||||
</envs>
|
||||
</ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
</configuration>
|
||||
<configuration PROFILE_NAME="espressif_s3_devkitc" ENABLED="false" TOOLCHAIN_NAME="ESP-IDF" GENERATION_OPTIONS="-DBOARD=espressif_s3_devkitc -DMAX3421_HOST=1 -DLOG=2">
|
||||
<ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
<envs>
|
||||
<env name="ESPBAUD" value="1500000" />
|
||||
</envs>
|
||||
</ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
</configuration>
|
||||
<configuration PROFILE_NAME="adafruit_metro_esp32s2" ENABLED="false" TOOLCHAIN_NAME="ESP-IDF" GENERATION_OPTIONS="-DBOARD=adafruit_metro_esp32s2 -DMAX3421_HOST=1 -DLOG=2">
|
||||
<ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
<envs>
|
||||
<env name="ESPBAUD" value="1500000" />
|
||||
</envs>
|
||||
</ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
</configuration>
|
||||
<configuration PROFILE_NAME="adafruit_feather_esp32_v2" ENABLED="false" TOOLCHAIN_NAME="ESP-IDF" GENERATION_OPTIONS="-DBOARD=adafruit_feather_esp32_v2 -DMAX3421_HOST=1 -DLOG=2">
|
||||
<ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
<envs>
|
||||
<env name="ESPBAUD" value="1500000" />
|
||||
</envs>
|
||||
</ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
</configuration>
|
||||
<configuration PROFILE_NAME="espressif_c3_devkitc" ENABLED="false" TOOLCHAIN_NAME="ESP-IDF" GENERATION_OPTIONS="-DBOARD=espressif_c3_devkitc -DMAX3421_HOST=1 -DLOG=2">
|
||||
<ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
<envs>
|
||||
<env name="ESPBAUD" value="1500000" />
|
||||
</envs>
|
||||
</ADDITIONAL_GENERATION_ENVIRONMENT>
|
||||
</configuration>
|
||||
<configuration PROFILE_NAME="feather_m0_express" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=feather_m0_express -DLOG=3 -DLOGGER=RTT -DMAX3421_HOST=1" />
|
||||
<configuration PROFILE_NAME="metro_m0_express" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=metro_m0_express -DLOG=3 -DLOGGER=RTT -DMAX3421_HOST=1" />
|
||||
<configuration PROFILE_NAME="feather_m4_express" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=feather_m4_express -DLOG=3 -DLOGGER=RTT -DMAX3421_HOST=1" />
|
||||
<configuration PROFILE_NAME="metro_m4_express" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=metro_m4_express -DLOG=3 -DLOGGER=RTT -DMAX3421_HOST=1" />
|
||||
<configuration PROFILE_NAME="same54_xplained" ENABLED="false" GENERATION_OPTIONS="-DBOARD=same54_xplained -DLOG=2 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="feather_nrf52840_express" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=feather_nrf52840_express -DLOG=3 -DLOGGER=RTT -DMAX3421_HOST=1" />
|
||||
<configuration PROFILE_NAME="pca10056" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=pca10056 -DLOG=3 -DLOGGER=RTT -DTRACE_ETM=1" />
|
||||
<configuration PROFILE_NAME="pca10095" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=pca10095 -DLOG=3 -DLOGGER=RTT -DTRACE_ETM=1" />
|
||||
<configuration PROFILE_NAME="metro m7 1011 sd" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=metro_m7_1011_sd -DLOG=3 -DLOGGER=RTT -DTRACE_ETM=1" />
|
||||
<configuration PROFILE_NAME="metro m7 1011" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=metro_m7_1011 -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="rt1010 evk" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=mimxrt1010_evk -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="rt1060 evk" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=mimxrt1060_evk -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="rt1170 evkb" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=mimxrt1170_evkb -DLOG=3 -DLOGGER=RTT -DTRACE_ETM=1" />
|
||||
<configuration PROFILE_NAME="lpcxpresso1769" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=lpcxpresso1769 -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="mcb1800" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=mcb1800 -DLOG=3 -DLOGGER=RTT -DTRACE_ETM=1" />
|
||||
<configuration PROFILE_NAME="ea4088 quickstart" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=ea4088_quickstart -DLOG=3 -DLOGGER=RTT -DTRACE_ETM=1" />
|
||||
<configuration PROFILE_NAME="ea4357" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=ea4357 -DLOG=3 -DLOGGER=RTT -DTRACE_ETM=1" />
|
||||
<configuration PROFILE_NAME="lpc5414" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=lpcxpresso54114 -DLOG=1 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="lpc54628" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=lpcxpresso54628 -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="lpc55s69" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=lpcxpresso55s69 -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="mcxn947brk" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=mcxn947brk -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="frdm_mcxa153" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=frdm_mcxa153 -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="frdm_kl25z" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=frdm_kl25z -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="frdm_k32l2a4s" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=frdm_k32l2a4s" />
|
||||
<configuration PROFILE_NAME="frdm_k64f" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=frdm_k64f -DLOG=2 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="stm32f072disco" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32f072disco" />
|
||||
<configuration PROFILE_NAME="stm32f103_mini_2" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32f103_mini_2" />
|
||||
<configuration PROFILE_NAME="stm32f207nucleo" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32f207nucleo -DLOG=2 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="stm32f303disco" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32f303disco -DLOG=2 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="stm32f411disco" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32f411disco -DLOG=2 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="stm32f769disco" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32f769disco -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="stm32g0b1nucleo" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32g0b1nucleo" />
|
||||
<configuration PROFILE_NAME="stm32g474nucleo" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32g474nucleo" />
|
||||
<configuration PROFILE_NAME="b_g474e_dpow1" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=b_g474e_dpow1 -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="stm32h563nucleo" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32h563nucleo -DLOG=3 -DLOGGER=RTT -DTRACE_ETM=1" />
|
||||
<configuration PROFILE_NAME="stm32h743eval" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32h743eval -DLOG=3 -DLOGGER=RTT -DTRACE_ETM=1" />
|
||||
<configuration PROFILE_NAME="stm32h743nucleo" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32h743nucleo -DLOG=3" />
|
||||
<configuration PROFILE_NAME="stm32l0538disco" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32l0538disco" />
|
||||
<configuration PROFILE_NAME="stm32l476disco" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32l476disco" />
|
||||
<configuration PROFILE_NAME="stm32u575nucleo" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32u575nucleo -DLOG=2 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="stm32u5a5nucleo" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=stm32u5a5nucleo -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="ra2a1" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=ra2a1_ek -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="ra4m1" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=ra4m1_ek -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="ra6m1" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=ra6m1_ek -DLOG=3 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="ra6m5" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=ra6m5_ek -DLOG=3 -DLOGGER=RTT -DTRACE_ETM=1" />
|
||||
<configuration PROFILE_NAME="ra6m5 PORT0" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=ra6m5_ek -DLOG=3 -DLOGGER=RTT -DTRACE_ETM=1 -DPORT=0" />
|
||||
<configuration PROFILE_NAME="uno_r4" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=uno_r4 -DLOG=4 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="portenta_c33" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=portenta_c33 -DLOG=3" />
|
||||
<configuration PROFILE_NAME="msp430f5529" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=msp_exp430f5529lp" />
|
||||
<configuration PROFILE_NAME="raspberrypi_zero" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=raspberrypi_zero -DLOG=2" />
|
||||
<configuration PROFILE_NAME="raspberrypi_cm4" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=raspberrypi_cm4 -DLOG=2" />
|
||||
<configuration PROFILE_NAME="raspberrypi_zero2" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=raspberrypi_zero2 -DLOG=2" />
|
||||
<configuration PROFILE_NAME="lpcxpresso11u68" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=lpcxpresso11u68 -DLOG=2 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="lpcxpresso1347" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=lpcxpresso1347 -DLOG=2 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="lpcxpresso1549" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=lpcxpresso1549 -DLOG=2 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="lpcxpresso51u68" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=lpcxpresso51u68 -DLOG=2 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="msp_exp432e401y" ENABLED="false" CONFIG_NAME="Debug" GENERATION_OPTIONS="-DBOARD=msp_exp432e401y -DLOG=2" />
|
||||
<configuration PROFILE_NAME="atsaml21_xpro" ENABLED="false" GENERATION_OPTIONS="-DBOARD=atsaml21_xpro" />
|
||||
<configuration PROFILE_NAME="stm32wb55nucleo" ENABLED="false" GENERATION_OPTIONS="-DBOARD=stm32wb55nucleo" />
|
||||
<configuration PROFILE_NAME="samd11_xplained" ENABLED="false" CONFIG_NAME="MinSizeRel" GENERATION_OPTIONS="-DBOARD=samd11_xplained" />
|
||||
<configuration PROFILE_NAME="ek_tm4c123gxl" ENABLED="false" CONFIG_NAME="MinSizeRel" GENERATION_OPTIONS="-DBOARD=ek_tm4c123gxl" />
|
||||
<configuration PROFILE_NAME="xmc4500_relax" ENABLED="false" GENERATION_OPTIONS="-DBOARD=xmc4500_relax -DLOG=2 -DLOGGER=RTT" />
|
||||
<configuration PROFILE_NAME="f1c100s" ENABLED="false" GENERATION_OPTIONS="-DBOARD=f1c100s" />
|
||||
<configuration PROFILE_NAME="samg55_xplained" ENABLED="true" GENERATION_OPTIONS="-DBOARD=samg55_xplained" />
|
||||
</configurations>
|
||||
</component>
|
||||
</project>
|
||||
10
.idea/runConfigurations/kl25.xml
generated
Normal file
10
.idea/runConfigurations/kl25.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="kl25" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="nxp" PROGRAM_PARAMS="-device "MKL25Z128xxx4" -if swd -speed 50000 -port 25321 -nogui -singlerun" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m0_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/lpc1857.xml
generated
Normal file
10
.idea/runConfigurations/lpc1857.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="lpc1857" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="nxp" PROGRAM_PARAMS="-device "lpc1857" -if swd -speed 50000 -port 25321 -nogui -singlerun" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/lpc4088.xml
generated
Normal file
10
.idea/runConfigurations/lpc4088.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="lpc4088" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="nxp" PROGRAM_PARAMS="-device "lpc4088" -if swd -speed 50000 -port 25321 -nogui -singlerun" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/lpc54628.xml
generated
Normal file
10
.idea/runConfigurations/lpc54628.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="lpc54628" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="nxp" PROGRAM_PARAMS="-device "LPC54628J512" -if swd -speed 50000 -port 25321 -nogui -singlerun" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/lpc55s69.xml
generated
Normal file
10
.idea/runConfigurations/lpc55s69.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="lpc55s69" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="nxp" PROGRAM_PARAMS="-device "lpc55s69" -if swd -speed 50000 -port 25321 -nogui -singlerun" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/mcx947.xml
generated
Normal file
10
.idea/runConfigurations/mcx947.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="mcx947" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="nxp" PROGRAM_PARAMS="-device "MCXN947_M33_0" -if swd -speed 50000 -port 25321 -nogui -singlerun -jlinkscriptfile $ProjectFileDir$/hw/bsp/mcx/debug.jlinkscript" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/nrf52840.xml
generated
Normal file
10
.idea/runConfigurations/nrf52840.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="nrf52840" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="nrf" PROGRAM_PARAMS="-select usb=752001685 -device "nrf52840_xxaa" -if swd -speed 8000 -port 25321 -nogui -singlerun" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/nrf5340.xml
generated
Normal file
10
.idea/runConfigurations/nrf5340.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="nrf5340" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="nrf" PROGRAM_PARAMS="-select usb=752001685 -device "nrf5340_xxaa_app" -if swd -speed 16000 -port 25321 -nogui -singlerun" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/ra4m1.xml
generated
Normal file
10
.idea/runConfigurations/ra4m1.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="ra4m1" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="renesas" PROGRAM_PARAMS="-device "R7FA4M1AB" -if swd -speed 50000 -port 25321 -nogui -singlerun -jlinkscriptfile $PROJECT_DIR$/hw/bsp/ra/debug.jlinkscript" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/ra6m1.xml
generated
Normal file
10
.idea/runConfigurations/ra6m1.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="ra6m1" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="renesas" PROGRAM_PARAMS="-device "R7FA6M1AD" -if swd -speed 50000 -port 25321 -nogui -singlerun -jlinkscriptfile $PROJECT_DIR$/hw/bsp/ra/debug.jlinkscript" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/ra6m5.xml
generated
Normal file
10
.idea/runConfigurations/ra6m5.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="ra6m5" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="renesas" PROGRAM_PARAMS="-device "R7FA6M5BH" -if swd -speed 50000 -port 25321 -nogui -singlerun -jlinkscriptfile $PROJECT_DIR$/hw/bsp/ra/debug.jlinkscript" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/rp2040.xml
generated
Normal file
10
.idea/runConfigurations/rp2040.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="rp2040" type="com.jetbrains.cidr.embedded.openocd.conf.type" factoryName="com.jetbrains.cidr.embedded.openocd.conf.factory" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<openocd version="1" gdb-port="3333" telnet-port="4444" board-config="$PROJECT_DIR$/hw/bsp/rp2040/rp2040-openocd.cfg" reset-type="INIT" download-type="UPDATED_ONLY">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</openocd>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/rt1010.xml
generated
Normal file
10
.idea/runConfigurations/rt1010.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="rt1010" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="nxp" PROGRAM_PARAMS="-device "MIMXRT1011xxx5A" -if swd -speed 50000 -port 25321 -nogui -singlerun -jlinkscriptfile $ProjectFileDir$/hw/bsp/imxrt/debug.jlinkscript" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/rt1060.xml
generated
Normal file
10
.idea/runConfigurations/rt1060.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="rt1060" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="nxp" PROGRAM_PARAMS="-device "MIMXRT1062xxx5A" -if swd -speed 50000 -port 25321 -nogui -singlerun" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/samd21g18.xml
generated
Normal file
10
.idea/runConfigurations/samd21g18.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="samd21g18" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="microchip" PROGRAM_PARAMS="-device "ATSAMD21G18" -if swd -speed 50000 -port 25321 -nogui -singlerun" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m0_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/samd51j19.xml
generated
Normal file
10
.idea/runConfigurations/samd51j19.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="samd51j19" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="microchip" PROGRAM_PARAMS="-device "ATSAMD51J19A" -if swd -speed 50000 -port 25321 -nogui -singlerun" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/stlink.xml
generated
Normal file
10
.idea/runConfigurations/stlink.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="stlink" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="stm32" PROGRAM_PARAMS="-p 10458 -cp "/opt/st/stm32cubeide_1.14.0/plugins/com.st.stm32cube.ide.mcu.externaltools.cubeprogrammer.linux64_2.1.100.202311100844/tools/bin" --frequency 8000 --swd" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::10458" executable="/opt/st/stm32cubeide_1.14.0/plugins/com.st.stm32cube.ide.mcu.externaltools.stlink-gdb-server.linux64_2.1.100.202310302101/tools/bin/ST-LINK_gdbserver" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/stm32g474.xml
generated
Normal file
10
.idea/runConfigurations/stm32g474.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="stm32g474" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="stm32" PROGRAM_PARAMS="-device "stm32g474re" -if swd -speed 50000 -port 25321 -nogui -singlerun" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/stm32h743.xml
generated
Normal file
10
.idea/runConfigurations/stm32h743.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="stm32h743" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="stm32" PROGRAM_PARAMS="-device "stm32h743xi" -if swd -speed 50000 -port 25321 -nogui -singlerun" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
10
.idea/runConfigurations/uno_r4.xml
generated
Normal file
10
.idea/runConfigurations/uno_r4.xml
generated
Normal file
@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="uno_r4" type="com.jetbrains.cidr.embedded.customgdbserver.type" factoryName="com.jetbrains.cidr.embedded.customgdbserver.factory" folderName="renesas" PROGRAM_PARAMS="-device "R7FA4M1AB" -if swd -speed 20000 -port 25321 -nogui -singlerun -jlinkscriptfile $PROJECT_DIR$/hw/bsp/ra/debug.jlinkscript" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" PASS_PARENT_ENVS_2="true" PROJECT_NAME="tinyusb_examples" TARGET_NAME="cdc_msc" CONFIG_NAME="metro_m4_express" version="1" RUN_TARGET_PROJECT_NAME="tinyusb_examples" RUN_TARGET_NAME="cdc_msc">
|
||||
<custom-gdb-server version="1" gdb-connect="tcp::25321" executable="/usr/bin/JLinkGDBServer" warmup-ms="0" download-type="ALWAYS" reset-cmd="monitor reset" reset-type="AFTER_DOWNLOAD">
|
||||
<debugger kind="GDB" isBundled="true" />
|
||||
</custom-gdb-server>
|
||||
<method v="2">
|
||||
<option name="CLION.COMPOUND.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
6
.idea/vcs.xml
generated
Normal file
6
.idea/vcs.xml
generated
Normal file
@ -0,0 +1,6 @@
|
||||
<?xml version="1.0" encoding="UTF-8"?>
|
||||
<project version="4">
|
||||
<component name="VcsDirectoryMappings">
|
||||
<mapping directory="$PROJECT_DIR$" vcs="Git" />
|
||||
</component>
|
||||
</project>
|
||||
44
.pre-commit-config.yaml
Normal file
44
.pre-commit-config.yaml
Normal file
@ -0,0 +1,44 @@
|
||||
# SPDX-FileCopyrightText: 2020 Diego Elio Pettenò
|
||||
#
|
||||
# SPDX-License-Identifier: Unlicense
|
||||
|
||||
repos:
|
||||
- repo: https://github.com/pre-commit/pre-commit-hooks
|
||||
rev: v4.4.0
|
||||
hooks:
|
||||
- id: check-yaml
|
||||
- id: trailing-whitespace
|
||||
exclude: |
|
||||
(?x)^(
|
||||
hw/bsp/mcx/sdk/
|
||||
)
|
||||
- id: end-of-file-fixer
|
||||
exclude: |
|
||||
(?x)^(
|
||||
.idea/|
|
||||
hw/bsp/mcx/sdk/|
|
||||
docs/contributing/code_of_conduct.rst|
|
||||
docs/info/contributors.rst
|
||||
)
|
||||
- id: forbid-submodules
|
||||
|
||||
- repo: https://github.com/codespell-project/codespell
|
||||
rev: v2.2.4
|
||||
hooks:
|
||||
- id: codespell
|
||||
args: [-w]
|
||||
exclude: |
|
||||
(?x)^(
|
||||
lib/|
|
||||
hw/bsp/mcx/sdk/
|
||||
)
|
||||
|
||||
- repo: local
|
||||
hooks:
|
||||
- id: unit-test
|
||||
name: unit-test
|
||||
files: ^(src/|test/unit-test/)
|
||||
entry: sh -c "cd test/unit-test && ceedling test:all"
|
||||
pass_filenames: false
|
||||
types_or: [c, header]
|
||||
language: system
|
||||
24
.readthedocs.yaml
Normal file
24
.readthedocs.yaml
Normal file
@ -0,0 +1,24 @@
|
||||
# .readthedocs.yaml
|
||||
# Read the Docs configuration file
|
||||
# See https://docs.readthedocs.io/en/stable/config-file/v2.html for details
|
||||
|
||||
version: 2
|
||||
|
||||
# Set the version of Python and other tools you might need
|
||||
build:
|
||||
os: ubuntu-22.04
|
||||
tools:
|
||||
python: "3.11"
|
||||
|
||||
# Build documentation in the docs/ directory with Sphinx
|
||||
sphinx:
|
||||
configuration: docs/conf.py
|
||||
|
||||
# Optionally declare the Python requirements required to build your docs
|
||||
python:
|
||||
install:
|
||||
- requirements: docs/requirements.txt
|
||||
|
||||
submodules:
|
||||
include: []
|
||||
recursive: false
|
||||
@ -1,76 +0,0 @@
|
||||
# Contributor Covenant Code of Conduct
|
||||
|
||||
## Our Pledge
|
||||
|
||||
In the interest of fostering an open and welcoming environment, we as
|
||||
contributors and maintainers pledge to making participation in our project and
|
||||
our community a harassment-free experience for everyone, regardless of age, body
|
||||
size, disability, ethnicity, sex characteristics, gender identity and expression,
|
||||
level of experience, education, socio-economic status, nationality, personal
|
||||
appearance, race, religion, or sexual identity and orientation.
|
||||
|
||||
## Our Standards
|
||||
|
||||
Examples of behavior that contributes to creating a positive environment
|
||||
include:
|
||||
|
||||
* Using welcoming and inclusive language
|
||||
* Being respectful of differing viewpoints and experiences
|
||||
* Gracefully accepting constructive criticism
|
||||
* Focusing on what is best for the community
|
||||
* Showing empathy towards other community members
|
||||
|
||||
Examples of unacceptable behavior by participants include:
|
||||
|
||||
* The use of sexualized language or imagery and unwelcome sexual attention or
|
||||
advances
|
||||
* Trolling, insulting/derogatory comments, and personal or political attacks
|
||||
* Public or private harassment
|
||||
* Publishing others' private information, such as a physical or electronic
|
||||
address, without explicit permission
|
||||
* Other conduct which could reasonably be considered inappropriate in a
|
||||
professional setting
|
||||
|
||||
## Our Responsibilities
|
||||
|
||||
Project maintainers are responsible for clarifying the standards of acceptable
|
||||
behavior and are expected to take appropriate and fair corrective action in
|
||||
response to any instances of unacceptable behavior.
|
||||
|
||||
Project maintainers have the right and responsibility to remove, edit, or
|
||||
reject comments, commits, code, wiki edits, issues, and other contributions
|
||||
that are not aligned to this Code of Conduct, or to ban temporarily or
|
||||
permanently any contributor for other behaviors that they deem inappropriate,
|
||||
threatening, offensive, or harmful.
|
||||
|
||||
## Scope
|
||||
|
||||
This Code of Conduct applies both within project spaces and in public spaces
|
||||
when an individual is representing the project or its community. Examples of
|
||||
representing a project or community include using an official project e-mail
|
||||
address, posting via an official social media account, or acting as an appointed
|
||||
representative at an online or offline event. Representation of a project may be
|
||||
further defined and clarified by project maintainers.
|
||||
|
||||
## Enforcement
|
||||
|
||||
Instances of abusive, harassing, or otherwise unacceptable behavior may be
|
||||
reported by contacting the project team at thach@tinyusb.org. All
|
||||
complaints will be reviewed and investigated and will result in a response that
|
||||
is deemed necessary and appropriate to the circumstances. The project team is
|
||||
obligated to maintain confidentiality with regard to the reporter of an incident.
|
||||
Further details of specific enforcement policies may be posted separately.
|
||||
|
||||
Project maintainers who do not follow or enforce the Code of Conduct in good
|
||||
faith may face temporary or permanent repercussions as determined by other
|
||||
members of the project's leadership.
|
||||
|
||||
## Attribution
|
||||
|
||||
This Code of Conduct is adapted from the [Contributor Covenant][homepage], version 1.4,
|
||||
available at https://www.contributor-covenant.org/version/1/4/code-of-conduct.html
|
||||
|
||||
[homepage]: https://www.contributor-covenant.org
|
||||
|
||||
For answers to common questions about this code of conduct, see
|
||||
https://www.contributor-covenant.org/faq
|
||||
88
CODE_OF_CONDUCT.rst
Normal file
88
CODE_OF_CONDUCT.rst
Normal file
@ -0,0 +1,88 @@
|
||||
***************
|
||||
Code of Conduct
|
||||
***************
|
||||
|
||||
Our Pledge
|
||||
----------
|
||||
|
||||
In the interest of fostering an open and welcoming environment, we as
|
||||
contributors and maintainers pledge to making participation in our
|
||||
project and our community a harassment-free experience for everyone,
|
||||
regardless of age, body size, disability, ethnicity, sex
|
||||
characteristics, gender identity and expression, level of experience,
|
||||
education, socio-economic status, nationality, personal appearance,
|
||||
race, religion, or sexual identity and orientation.
|
||||
|
||||
Our Standards
|
||||
-------------
|
||||
|
||||
Examples of behavior that contributes to creating a positive environment
|
||||
include:
|
||||
|
||||
- Using welcoming and inclusive language
|
||||
- Being respectful of differing viewpoints and experiences
|
||||
- Gracefully accepting constructive criticism
|
||||
- Focusing on what is best for the community
|
||||
- Showing empathy towards other community members
|
||||
|
||||
Examples of unacceptable behavior by participants include:
|
||||
|
||||
- The use of sexualized language or imagery and unwelcome sexual
|
||||
attention or advances
|
||||
- Trolling, insulting/derogatory comments, and personal or political
|
||||
attacks
|
||||
- Public or private harassment
|
||||
- Publishing others' private information, such as a physical or
|
||||
electronic address, without explicit permission
|
||||
- Other conduct which could reasonably be considered inappropriate in a
|
||||
professional setting
|
||||
|
||||
Our Responsibilities
|
||||
--------------------
|
||||
|
||||
Project maintainers are responsible for clarifying the standards of
|
||||
acceptable behavior and are expected to take appropriate and fair
|
||||
corrective action in response to any instances of unacceptable behavior.
|
||||
|
||||
Project maintainers have the right and responsibility to remove, edit,
|
||||
or reject comments, commits, code, wiki edits, issues, and other
|
||||
contributions that are not aligned to this Code of Conduct, or to ban
|
||||
temporarily or permanently any contributor for other behaviors that they
|
||||
deem inappropriate, threatening, offensive, or harmful.
|
||||
|
||||
Scope
|
||||
-----
|
||||
|
||||
This Code of Conduct applies both within project spaces and in public
|
||||
spaces when an individual is representing the project or its community.
|
||||
Examples of representing a project or community include using an
|
||||
official project e-mail address, posting via an official social media
|
||||
account, or acting as an appointed representative at an online or
|
||||
offline event. Representation of a project may be further defined and
|
||||
clarified by project maintainers.
|
||||
|
||||
Enforcement
|
||||
-----------
|
||||
|
||||
Instances of abusive, harassing, or otherwise unacceptable behavior may
|
||||
be reported by contacting the project team at thach@tinyusb.org. All
|
||||
complaints will be reviewed and investigated and will result in a
|
||||
response that is deemed necessary and appropriate to the circumstances.
|
||||
The project team is obligated to maintain confidentiality with regard to
|
||||
the reporter of an incident. Further details of specific enforcement
|
||||
policies may be posted separately.
|
||||
|
||||
Project maintainers who do not follow or enforce the Code of Conduct in
|
||||
good faith may face temporary or permanent repercussions as determined
|
||||
by other members of the project's leadership.
|
||||
|
||||
Attribution
|
||||
-----------
|
||||
|
||||
This Code of Conduct is adapted from the `Contributor
|
||||
Covenant <https://www.contributor-covenant.org>`__, version 1.4,
|
||||
available at
|
||||
https://www.contributor-covenant.org/version/1/4/code-of-conduct.html
|
||||
|
||||
For answers to common questions about this code of conduct, see
|
||||
https://www.contributor-covenant.org/faq
|
||||
@ -1,97 +0,0 @@
|
||||
# TinyUSB contributors (sorted alphabetically)
|
||||
|
||||
- **[Adafruit Team](https://github.com/adafruit)**
|
||||
- Main supporter and sponsor for hardware boards and kits
|
||||
- Discussion and suggestion for feature and improvement
|
||||
- Design the project logo
|
||||
|
||||
- **[Ha Thach](https://github.com/hathach)**
|
||||
- *Author and maintainer*
|
||||
- Most features development
|
||||
|
||||
- **[Hristo Gochkov](https://github.com/me-no-dev)**
|
||||
- Improve ESP32s2 DCD
|
||||
|
||||
- **[Jan Dümpelmann](https://github.com/duempel)**
|
||||
- Improve transfer performance for Synopsys DCD for STM32 MCUs
|
||||
|
||||
- **[Jeff Epler](https://github.com/jepler)**
|
||||
- Improve MIDI class driver
|
||||
|
||||
- **[Jerzy Kasenberg](https://github.com/kasjer)**
|
||||
- Add new DCD port for **Dialog DA1469x**
|
||||
- Add new class driver for **Bluetooth HCI**
|
||||
- Add ISO transfer for STM32 Synopsys, Nordic nRF, Dialog DA1469x
|
||||
- Improve Audio driver and add uac2_headset example
|
||||
- Improve STM32 Synopsys DCD with various PRs
|
||||
|
||||
- **[J McCarthy](https://github.com/xmos-jmccarthy)**
|
||||
- Add new DFU 1.1 class driver
|
||||
- Add new example for dfu
|
||||
|
||||
- **[Kamil Tomaszewski](https://github.com/kamtom480)**
|
||||
- Add new DCD port for **Sony CXD56** (spresnese board)
|
||||
|
||||
- **[Kay Sievers](https://github.com/kaysievers)**
|
||||
- Improve MIDI driver with packet API
|
||||
|
||||
- **[Koji KITAYAMA](https://github.com/kkitayam)**
|
||||
- Add new DCD port for **NXP Kinetis KL25**
|
||||
- Add new DCD port for **Renesas RX63n** with GR-CITRUS board
|
||||
|
||||
- **[Nathan Conrad](https://github.com/pigrew)**
|
||||
- Add new DCD port for **STM32 fsdev** Fullspeed device for STM32 L0, F0, F1, F3 etc ...
|
||||
- Add new class driver for **USB Test and Measurement Class (USBTMC)**
|
||||
- Various improvement e.g Zero-length packet, Lint setup
|
||||
- Board support for STM32F070RB Nucleo, STM32F303 Discovery
|
||||
|
||||
- **[Peter Lawrence](https://github.com/majbthrd)**
|
||||
- Add new DCD port for **Nuvoton NUC 120, 121, 125, 126, 505**
|
||||
- Add new class driver for **USBNET RNDIS, CDC-ECM**
|
||||
- Add *net_lwip_webserver* example for demonstration of usbnet with lwip
|
||||
- Board support for NuTiny NUC120, NUC121s, NUC125s, NUC126V, NUC505
|
||||
- Improve multiple cdc interfaces API & add cdc_dual_ports example
|
||||
|
||||
- **[Rafael Silva](https://github.com/perigoso)**
|
||||
- Add new DCD port for **Silabs EFM32GG12** with SLTB009A board
|
||||
|
||||
- **[Raspberry Pi Team](https://github.com/raspberrypi)**
|
||||
- Add new DCD port for **Raspberry Pi RP2040**
|
||||
- Add new HCD port for **Raspberry Pi RP2040**
|
||||
|
||||
- **[Reinhard Panhuber](https://github.com/PanRe)**
|
||||
- Add new class driver for **USB Audio Class 2.0 (UAC2)**
|
||||
- Rework tu_fifo with unmasked pointer, add DMA support, and constant address support
|
||||
- Add new DCD/USBD edpt_xfer_fifo() API for optimizing endpoint transfer
|
||||
- Add and greatly improve Isochronous transfer
|
||||
- Add new audio examples: audio_test and audio_4_channel_mic
|
||||
|
||||
- **[Scott Shawcroft](https://github.com/tannewt)**
|
||||
- Add new DCD port for **SAMD21 and SAMD51**
|
||||
- Add new class driver for **Musical Instrument Digital Interface (MIDI)**
|
||||
- Improve USBD control transfer, MSC, CDC class driver
|
||||
- Board support for Metro M0 & M4 express
|
||||
- Write the excellent porting.md documentation
|
||||
- Add initial Makefile
|
||||
|
||||
- **[Sean Cross](https://github.com/xobs)**
|
||||
- Add new DCD port for **ValentyUSB eptri** (fomu board)
|
||||
|
||||
- **[Sylvain "tnt" Munaut](https://github.com/smunaut)**
|
||||
- Add new class driver for DFU Runtime
|
||||
|
||||
- **[Timon Skerutsch](https://github.com/PTS93)**
|
||||
- Add hid_test.js script and extensive test for bi-directional raw HID
|
||||
|
||||
- **[Tod E. Kurt](https://github.com/todbot)**
|
||||
- Add hid_test.js script and extensive test for bi-directional raw HID
|
||||
|
||||
- **[Uwe Bonnes](https://github.com/UweBonnes)**
|
||||
- Improve STM32 Synopsys highspeed DCD
|
||||
|
||||
- **[William D. Jones](https://github.com/cr1901)**
|
||||
- Add new DCD port for **Synopsys DesignWare** for STM32 L4, F2, F4, F7, H7 etc ...
|
||||
- Add new DCD port for **TI MSP430**
|
||||
- Board support for STM32F407 Discovery, STM32H743 Nucleo, pyboard v1.1, msp_exp430f5529lp etc ...
|
||||
|
||||
**[Full contributors list](https://github.com/hathach/tinyusb/contributors).**
|
||||
208
CONTRIBUTORS.rst
Normal file
208
CONTRIBUTORS.rst
Normal file
@ -0,0 +1,208 @@
|
||||
************
|
||||
Contributors
|
||||
************
|
||||
|
||||
Special thanks to all the people who spent their precious time and effort to help this project so far.
|
||||
list contributors and their awesome work for the stack:
|
||||
|
||||
Notable contributors
|
||||
====================
|
||||
|
||||
(sorted alphabetically)
|
||||
|
||||
`Adafruit Team <https://github.com/adafruit>`__
|
||||
-----------------------------------------------
|
||||
|
||||
- Main supporter and sponsor for hardware boards and kits
|
||||
- Discussion and suggestion for feature and improvement
|
||||
- Design the project logo
|
||||
|
||||
|
||||
`Gordon McNab <https://github.com/ftdigdm>`__
|
||||
---------------------------------------------
|
||||
|
||||
- Add new DCD port for Bridgetek FT90x and FT93x
|
||||
|
||||
|
||||
`Ha Thach <https://github.com/hathach>`__
|
||||
-----------------------------------------
|
||||
|
||||
- *Author and maintainer*
|
||||
- Most features development
|
||||
|
||||
|
||||
`Hristo Gochkov <https://github.com/me-no-dev>`__
|
||||
-------------------------------------------------
|
||||
|
||||
- Improve ESP32s2 DCD
|
||||
|
||||
|
||||
`Jacob Berg Potter <https://github.com/j4cbo>`__
|
||||
------------------------------------------------
|
||||
|
||||
- Add new class driver for network CDC-NCM
|
||||
|
||||
|
||||
`Jan Dümpelmann <https://github.com/duempel>`__
|
||||
-----------------------------------------------
|
||||
|
||||
- Improve transfer performance for Synopsys DCD for STM32 MCUs
|
||||
|
||||
|
||||
`Jeff Epler <https://github.com/jepler>`__
|
||||
------------------------------------------
|
||||
|
||||
- Improve MIDI class driver
|
||||
|
||||
|
||||
`Jerzy Kasenberg <https://github.com/kasjer>`__
|
||||
-----------------------------------------------
|
||||
|
||||
- Add new DCD port for Dialog DA1469x
|
||||
- Add new DCD port for PIC32MZ
|
||||
- Add new class driver for Bluetooth HCI
|
||||
- Add ISO transfer for STM32 Synopsys, Nordic nRF, Dialog DA1469x
|
||||
- Improve Audio driver and add uac2\_headset example
|
||||
- Improve STM32 Synopsys DCD with various PRs
|
||||
|
||||
|
||||
`J McCarthy <https://github.com/xmos-jmccarthy>`__
|
||||
--------------------------------------------------
|
||||
|
||||
- Add new DFU 1.1 class driver
|
||||
- Add new example for dfu
|
||||
|
||||
|
||||
`Kamil Tomaszewski <https://github.com/kamtom480>`__
|
||||
----------------------------------------------------
|
||||
|
||||
- Add new DCD port for Sony CXD56 (spresnese board)
|
||||
|
||||
|
||||
`Kay Sievers <https://github.com/kaysievers>`__
|
||||
-----------------------------------------------
|
||||
|
||||
- Improve MIDI driver with packet API
|
||||
|
||||
|
||||
`Koji KITAYAMA <https://github.com/kkitayam>`__
|
||||
-----------------------------------------------
|
||||
|
||||
- Add new DCD and HCD port for NXP Kinetis KL25
|
||||
- Add new DCD and HCD port for Renesas RX family (RX600, RX700 ..) with GR-CITRUS, RX65n target board
|
||||
- Add new DCD and HCD port for Mentor musb with MSP432E4
|
||||
- Add new class driver for USB Video Class (UVC 1.5)
|
||||
|
||||
`Nathan Conrad <https://github.com/pigrew>`__
|
||||
---------------------------------------------
|
||||
|
||||
- Add new DCD port for STM32 fsdev Fullspeed device for STM32 L0,
|
||||
F0, F1, F3 etc ...
|
||||
- Add new class driver for USB Test and Measurement Class (USBTMC)
|
||||
- Various improvement e.g Zero-length packet, Lint setup
|
||||
- Board support for STM32F070RB Nucleo, STM32F303 Discovery
|
||||
|
||||
|
||||
`Peter Lawrence <https://github.com/majbthrd>`__
|
||||
------------------------------------------------
|
||||
|
||||
- Add new DCD port for Nuvoton NUC 120, 121, 125, 126, 505
|
||||
- Add new class driver for network RNDIS, CDC-ECM
|
||||
- Enhance CDC-NCM network driver to compatible with RNDIS/ECM
|
||||
- Add *net\_lwip\_webserver* example for demonstration of usbnet with lwip
|
||||
- Board support for NuTiny NUC120, NUC121s, NUC125s, NUC126V, NUC505
|
||||
- Improve multiple cdc interfaces API & add cdc\_dual\_ports example
|
||||
|
||||
|
||||
`Rafael Silva <https://github.com/perigoso>`__
|
||||
----------------------------------------------
|
||||
|
||||
- Port DCD Synopsys to support Silabs EFM32GG12 with SLTB009A board
|
||||
- Rewrite documentation in rst and setup for readthedocs
|
||||
- Generalize Renesas driver and support RA family with EK-RA4M3 board
|
||||
|
||||
|
||||
`Raspberry Pi Team <https://github.com/raspberrypi>`__
|
||||
------------------------------------------------------
|
||||
|
||||
- Add new DCD port for Raspberry Pi RP2040
|
||||
- Add new HCD port for Raspberry Pi RP2040
|
||||
|
||||
|
||||
`Reinhard Panhuber <https://github.com/PanRe>`__
|
||||
------------------------------------------------
|
||||
|
||||
- Add new class driver for USB Audio Class 2.0 (UAC2)
|
||||
- Rework tu\_fifo with unmasked pointer, add DMA support, and constant address support
|
||||
- Add new DCD/USBD edpt\_xfer\_fifo() API for optimizing endpoint transfer
|
||||
- Add and greatly improve Isochronous transfer
|
||||
- Add new audio examples: audio\_test and audio\_4\_channel\_mic
|
||||
|
||||
|
||||
`Scott Shawcroft <https://github.com/tannewt>`__
|
||||
------------------------------------------------
|
||||
|
||||
- Add new DCD port for SAMD21 and SAMD51
|
||||
- Add new class driver for Musical Instrument Digital Interface (MIDI)
|
||||
- Improve USBD control transfer, MSC, CDC class driver
|
||||
- Board support for Metro M0 & M4 express
|
||||
- Write the excellent porting.md documentation
|
||||
- Add initial Makefile
|
||||
|
||||
`Sean Cross <https://github.com/xobs>`__
|
||||
----------------------------------------
|
||||
|
||||
- Add new DCD port for ValentyUSB eptri (fomu board)
|
||||
|
||||
|
||||
`Sylvain "tnt" Munaut <https://github.com/smunaut>`__
|
||||
-----------------------------------------------------
|
||||
|
||||
- Add new class driver for DFU Runtime
|
||||
|
||||
|
||||
`Tian Yunhao <https://github.com/t123yh>`__
|
||||
-------------------------------------------
|
||||
|
||||
- Add new DCD port for Allwinner F1C100S/F1C200S
|
||||
- Add support for osal_rtx4
|
||||
|
||||
`Timon Skerutsch <https://github.com/PTS93>`__
|
||||
----------------------------------------------
|
||||
|
||||
- Add hid\_test.js script and extensive test for bi-directional raw HID
|
||||
|
||||
|
||||
`Tod E. Kurt <https://github.com/todbot>`__
|
||||
-------------------------------------------
|
||||
|
||||
- Add hid\_test.js script and extensive test for bi-directional raw HID
|
||||
|
||||
|
||||
`Uwe Bonnes <https://github.com/UweBonnes>`__
|
||||
---------------------------------------------
|
||||
|
||||
- Improve STM32 Synopsys highspeed DCD
|
||||
|
||||
|
||||
`William D. Jones <https://github.com/cr1901>`__
|
||||
------------------------------------------------
|
||||
|
||||
- Add new DCD port for Synopsys DesignWare for STM32 L4, F2, F4,
|
||||
F7, H7 etc ...
|
||||
- Add new DCD port for TI MSP430
|
||||
- Board support for STM32F407 Discovery, STM32H743 Nucleo, pyboard v1.1, msp\_exp430f5529lp etc ...
|
||||
|
||||
|
||||
`Zixun Li <https://github.com/HiFiPhile>`__
|
||||
-------------------------------------------
|
||||
|
||||
- Add new DCD port for Microchip SAMx7x
|
||||
- Add IAR compiler support
|
||||
- Improve UAC2, CDC, DFU class driver
|
||||
- Improve stm32_fsdev, chipidea_ci_hs, lpc_ip3511 DCD
|
||||
- Host IAR Build CI & hardware in the loop (HITL) test
|
||||
|
||||
|
||||
`Full contributors list <https://github.com/hathach/tinyusb/contributors>`__
|
||||
============================================================================
|
||||
111
README.md
111
README.md
@ -1,111 +0,0 @@
|
||||
# TinyUSB
|
||||
|
||||

|
||||
|
||||
[](https://github.com/hathach/tinyusb/actions) [](https://opensource.org/licenses/MIT)
|
||||
|
||||
TinyUSB is an open-source cross-platform USB Host/Device stack for embedded system, designed to be memory-safe with no dynamic allocation and thread-safe with all interrupt events are deferred then handled in the non-ISR task function.
|
||||
|
||||
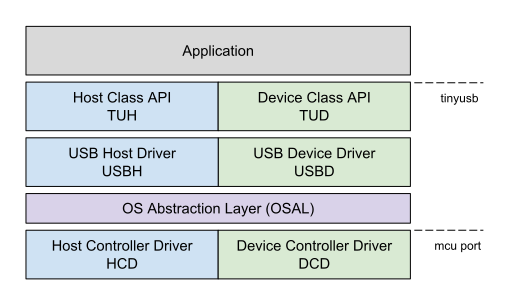
|
||||
|
||||
```
|
||||
.
|
||||
├── docs # Documentation
|
||||
├── examples # Sample with Makefile build support
|
||||
├── hw
|
||||
│ ├── bsp # Supported boards source files
|
||||
│ └── mcu # Low level mcu core & peripheral drivers
|
||||
├── lib # Sources from 3rd party such as freeRTOS, fatfs ...
|
||||
├── src # All sources files for TinyUSB stack itself.
|
||||
├── test # Unit tests for the stack
|
||||
└── tools # Files used internally
|
||||
```
|
||||
|
||||
## Contributors
|
||||
|
||||
Special thanks to all the people who spent their precious time and effort to help this project so far. Check out the
|
||||
[CONTRIBUTORS.md](CONTRIBUTORS.md) file for the list of all contributors and their awesome work for the stack.
|
||||
|
||||
## Supported MCUs
|
||||
|
||||
The stack supports the following MCUs:
|
||||
|
||||
- **Dialog:** DA1469x
|
||||
- **Espressif:** ESP32-S2, ESP32-S3
|
||||
- **MicroChip:** SAMD11, SAMD21, SAMD51, SAME5x, SAMG55
|
||||
- **NordicSemi:** nRF52833, nRF52840
|
||||
- **Nuvoton:** NUC120, NUC121/NUC125, NUC126, NUC505
|
||||
- **NXP:**
|
||||
- iMX RT Series: RT1011, RT1015, RT1021, RT1052, RT1062, RT1064
|
||||
- Kinetis: KL25
|
||||
- LPC Series: 11u, 13, 15, 17, 18, 40, 43, 51u, 54, 55
|
||||
- **Raspberry Pi:** RP2040
|
||||
- **Renesas:** RX63N
|
||||
- **Silabs:** EFM32GG12
|
||||
- **Sony:** CXD56
|
||||
- **ST:** STM32 series: L0, F0, F1, F2, F3, F4, F7, H7 both FullSpeed and HighSpeed
|
||||
- **TI:** MSP430
|
||||
- **[ValentyUSB](https://github.com/im-tomu/valentyusb)** eptri
|
||||
|
||||
[Here is the list of supported Boards](docs/boards.md) that can be used with provided examples.
|
||||
|
||||
## Device Stack
|
||||
|
||||
Supports multiple device configurations by dynamically changing usb descriptors. Low power functions such like suspend, resume, and remote wakeup. Following device classes are supported:
|
||||
|
||||
- Audio Class 2.0 (UAC2) still work in progress
|
||||
- Bluetooth Host Controller Interface (BTH HCI)
|
||||
- Communication Class (CDC)
|
||||
- Device Firmware Update (DFU): DFU mode (WIP) and Runtinme
|
||||
- Human Interface Device (HID): Generic (In & Out), Keyboard, Mouse, Gamepad etc ...
|
||||
- Mass Storage Class (MSC): with multiple LUNs
|
||||
- Musical Instrument Digital Interface (MIDI)
|
||||
- Network with RNDIS, CDC-ECM (work in progress)
|
||||
- USB Test and Measurement Class (USBTMC)
|
||||
- Vendor-specific class support with generic In & Out endpoints. Can be used with MS OS 2.0 compatible descriptor to load winUSB driver without INF file.
|
||||
- [WebUSB](https://github.com/WICG/webusb) with vendor-specific class
|
||||
|
||||
If you have special need, `usbd_app_driver_get_cb()` can be used to write your own class driver without modifying the stack. Here is how RPi team add their reset interface [raspberrypi/pico-sdk#197](https://github.com/raspberrypi/pico-sdk/pull/197)
|
||||
|
||||
## Host Stack
|
||||
|
||||
**Most active development is on the Device stack. The Host stack is under rework and largely untested.**
|
||||
|
||||
- Human Interface Device (HID): Keyboard, Mouse, Generic
|
||||
- Mass Storage Class (MSC)
|
||||
- Hub currently only supports 1 level of hub (due to my laziness)
|
||||
|
||||
## OS Abstraction layer
|
||||
|
||||
TinyUSB is completely thread-safe by pushing all ISR events into a central queue, then process it later in the non-ISR context task function. It also uses semaphore/mutex to access shared resources such as CDC FIFO. Therefore the stack needs to use some of OS's basic APIs. Following OSes are already supported out of the box.
|
||||
|
||||
- **No OS**
|
||||
- **FreeRTOS**
|
||||
- **Mynewt** Due to the newt package build system, Mynewt examples are better to be on its [own repo](https://github.com/hathach/mynewt-tinyusb-example)
|
||||
|
||||
## Getting Started
|
||||
|
||||
[Here are the details for getting started](docs/getting_started.md) with the stack.
|
||||
|
||||
## Porting
|
||||
|
||||
Want to help add TinyUSB support for a new MCU? Read [here](docs/porting.md) for an explanation on the low-level API needed by TinyUSB.
|
||||
|
||||
## License
|
||||
|
||||
MIT license for all TinyUSB sources `src` folder, [Full license is here](LICENSE). However, each file is individually licensed especially those in `lib` and `hw/mcu` folder. Please make sure you understand all the license term for files you use in your project.
|
||||
|
||||
## Uses
|
||||
|
||||
TinyUSB is currently used by these other projects:
|
||||
|
||||
- [Adafruit nRF52 Arduino](https://github.com/adafruit/Adafruit_nRF52_Arduino)
|
||||
- [Adafruit nRF52 Bootloader](https://github.com/adafruit/Adafruit_nRF52_Bootloader)
|
||||
- [Adafruit SAMD Arduino](https://github.com/adafruit/ArduinoCore-samd)
|
||||
- [CircuitPython](https://github.com/adafruit/circuitpython)
|
||||
- [Espressif IDF](https://github.com/espressif/esp-idf)
|
||||
- [MicroPython](https://github.com/micropython/micropython)
|
||||
- [mynewt](https://mynewt.apache.org)
|
||||
- [Raspberry Pi Pico SDK](https://github.com/raspberrypi/pico-sdk)
|
||||
- [TinyUF2 Bootloader](https://github.com/adafruit/tinyuf2)
|
||||
- [TinyUSB Arduino Library](https://github.com/adafruit/Adafruit_TinyUSB_Arduino)
|
||||
215
README.rst
Normal file
215
README.rst
Normal file
@ -0,0 +1,215 @@
|
||||
|Build Status| |Documentation Status| |Fuzzing Status| |License|
|
||||
|
||||
Sponsors
|
||||
========
|
||||
|
||||
TinyUSB is funded by: Adafruit. Purchasing products from them helps to support this project.
|
||||
|
||||
.. figure:: docs/assets/adafruit_logo.svg
|
||||
:alt: Adafruit Logo
|
||||
:target: https://www.adafruit.com
|
||||
|
||||
TinyUSB Project
|
||||
===============
|
||||
|
||||
.. figure:: docs/assets/logo.svg
|
||||
:alt: TinyUSB
|
||||
|
||||
TinyUSB is an open-source cross-platform USB Host/Device stack for
|
||||
embedded system, designed to be memory-safe with no dynamic allocation
|
||||
and thread-safe with all interrupt events are deferred then handled in
|
||||
the non-ISR task function. Check out the online `documentation <https://docs.tinyusb.org/>`__ for more details.
|
||||
|
||||
.. figure:: docs/assets/stack.svg
|
||||
:width: 500px
|
||||
:alt: stackup
|
||||
|
||||
::
|
||||
|
||||
.
|
||||
├── docs # Documentation
|
||||
├── examples # Examples with make and cmake build system
|
||||
├── hw
|
||||
│ ├── bsp # Supported boards source files
|
||||
│ └── mcu # Low level mcu core & peripheral drivers
|
||||
├── lib # Sources from 3rd party such as freeRTOS, fatfs ...
|
||||
├── src # All sources files for TinyUSB stack itself.
|
||||
├── test # Tests: unit test, fuzzing, hardware test
|
||||
└── tools # Files used internally
|
||||
|
||||
|
||||
Getting started
|
||||
===============
|
||||
|
||||
See the `online documentation <https://docs.tinyusb.org>`_ for information about using TinyUSB and how it is implemented.
|
||||
|
||||
We use `GitHub Discussions <https://github.com/hathach/tinyusb/discussions>`_ as our forum. It is a great place to ask questions and advice from the community or to discuss your TinyUSB-based projects.
|
||||
|
||||
For bugs and feature requests, please `raise an issue <https://github.com/hathach/tinyusb/issues>`_ and follow the templates there.
|
||||
|
||||
Check out `Getting Started`_ guide for adding TinyUSB to your project or building the examples. If you are new to TinyUSB, we recommend starting with the `cdc_msc` example.
|
||||
|
||||
See `Porting`_ guide for adding support for new MCUs and boards.
|
||||
|
||||
Device Stack
|
||||
============
|
||||
|
||||
Supports multiple device configurations by dynamically changing USB descriptors, low power functions such like suspend, resume, and remote wakeup. The following device classes are supported:
|
||||
|
||||
- Audio Class 2.0 (UAC2)
|
||||
- Bluetooth Host Controller Interface (BTH HCI)
|
||||
- Communication Device Class (CDC)
|
||||
- Device Firmware Update (DFU): DFU mode (WIP) and Runtime
|
||||
- Human Interface Device (HID): Generic (In & Out), Keyboard, Mouse, Gamepad etc ...
|
||||
- Mass Storage Class (MSC): with multiple LUNs
|
||||
- Musical Instrument Digital Interface (MIDI)
|
||||
- Network with RNDIS, Ethernet Control Model (ECM), Network Control Model (NCM)
|
||||
- Test and Measurement Class (USBTMC)
|
||||
- Video class 1.5 (UVC): work in progress
|
||||
- Vendor-specific class support with generic In & Out endpoints. Can be used with MS OS 2.0 compatible descriptor to load winUSB driver without INF file.
|
||||
- `WebUSB <https://github.com/WICG/webusb>`__ with vendor-specific class
|
||||
|
||||
If you have a special requirement, `usbd_app_driver_get_cb()` can be used to write your own class driver without modifying the stack. Here is how the RPi team added their reset interface `raspberrypi/pico-sdk#197 <https://github.com/raspberrypi/pico-sdk/pull/197>`_
|
||||
|
||||
Host Stack
|
||||
==========
|
||||
|
||||
- Human Interface Device (HID): Keyboard, Mouse, Generic
|
||||
- Mass Storage Class (MSC)
|
||||
- Communication Device Class: CDC-ACM
|
||||
- Vendor serial over USB: FTDI, CP210x
|
||||
- Hub with multiple-level support
|
||||
|
||||
Similar to the Device Stack, if you have a special requirement, `usbh_app_driver_get_cb()` can be used to write your own class driver without modifying the stack.
|
||||
|
||||
TypeC PD Stack
|
||||
==============
|
||||
|
||||
- Power Delivery 3.0 (PD3.0) with USB Type-C support (WIP)
|
||||
- Super early stage, only for testing purpose
|
||||
- Only support STM32 G4
|
||||
|
||||
OS Abstraction layer
|
||||
====================
|
||||
|
||||
TinyUSB is completely thread-safe by pushing all Interrupt Service Request (ISR) events into a central queue, then processing them later in the non-ISR context task function. It also uses semaphore/mutex to access shared resources such as Communication Device Class (CDC) FIFO. Therefore the stack needs to use some of the OS's basic APIs. Following OSes are already supported out of the box.
|
||||
|
||||
- **No OS**
|
||||
- **FreeRTOS**
|
||||
- `RT-Thread <https://github.com/RT-Thread/rt-thread>`_: `repo <https://github.com/RT-Thread-packages/tinyusb>`_
|
||||
- **Mynewt** Due to the newt package build system, Mynewt examples are better to be on its `own repo <https://github.com/hathach/mynewt-tinyusb-example>`_
|
||||
|
||||
Supported CPUs
|
||||
==============
|
||||
|
||||
Following CPUs are supported, check out `Supported Devices`_ for comprehensive list of driver, features for each CPU.
|
||||
|
||||
+--------------+------------------------------------------------------------+
|
||||
| Manufacturer | Family |
|
||||
+==============+============================================================+
|
||||
| Allwinner | F1C100s/F1C200s |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| Analog | MAX3421E (usb host shield) |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| Brigetek | FT90x |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| Broadcom | BCM2711, BCM2837 |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| Dialog | DA1469x |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| Espressif | ESP32 S2, S3 |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| GigaDevice | GD32VF103 |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| Infineon | XMC4500 |
|
||||
+--------------+-----+------------------------------------------------------+
|
||||
| MicroChip | SAM | D11, D21, D51, E5x, G55, L2x, E7x, S7x, V7x |
|
||||
| +-----+------------------------------------------------------+
|
||||
| | PIC | 24, 32mm, 32mk, 32mx, 32mz, dsPIC33 |
|
||||
+--------------+-----+------------------------------------------------------+
|
||||
| Mind Montion | mm32 |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| NordicSemi | nRF52833, nRF52840, nRF5340 |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| Nuvoton | NUC 120, 121, 125, 126, 505 |
|
||||
+--------------+---------+--------------------------------------------------+
|
||||
| NXP | iMXRT | RT10xx, RT11xx |
|
||||
| +---------+--------------------------------------------------+
|
||||
| | Kinetis | KL, K32L2 |
|
||||
| +---------+--------------------------------------------------+
|
||||
| | LPC | 11u, 13, 15, 17, 18, 40, 43, 51u, 54, 55 |
|
||||
| +---------+--------------------------------------------------+
|
||||
| | MCX | A15, N9 |
|
||||
+--------------+---------+--------------------------------------------------+
|
||||
| Raspberry Pi | RP2040 |
|
||||
+--------------+-----+------------------------------------------------------+
|
||||
| Renesas | RX | 63N, 65N, 72N |
|
||||
+--------------+-----+------------------------------------------------------+
|
||||
| | RA | 4M1, 4M3, 6M1, 6M5 |
|
||||
+--------------+-----+------------------------------------------------------+
|
||||
| Silabs | EFM32GG12 |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| Sony | CXD56 |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| ST STM32 | F0, F1, F2, F3, F4, F7, H7, G0, G4, L0, L1, L4, L4+ U5, WB |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| TI | MSP430, MSP432E4, TM4C123 |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| ValentyUSB | eptri |
|
||||
+--------------+------------------------------------------------------------+
|
||||
| WCH | CH32F20x, CH32V307, |
|
||||
+--------------+------------------------------------------------------------+
|
||||
|
||||
License
|
||||
=======
|
||||
|
||||
All TinyUSB sources in the ``src`` folder are licensed under MIT
|
||||
license, the `Full license is here <LICENSE>`__. However, each file can be
|
||||
individually licensed especially those in ``lib`` and ``hw/mcu`` folder.
|
||||
Please make sure you understand all the license term for files you use
|
||||
in your project.
|
||||
|
||||
Docs
|
||||
====
|
||||
|
||||
- Info
|
||||
|
||||
- `Uses`_
|
||||
- `Changelog`_
|
||||
- `Contributors`_
|
||||
|
||||
- `Reference`_
|
||||
|
||||
- `Supported Devices`_
|
||||
- `Getting Started`_
|
||||
- `Dependencies`_
|
||||
- `Concurrency`_
|
||||
|
||||
- `Contributing`_
|
||||
|
||||
- `Code of Conduct`_
|
||||
- `Structure`_
|
||||
- `Porting`_
|
||||
|
||||
.. |Build Status| image:: https://github.com/hathach/tinyusb/actions/workflows/cmake_arm.yml/badge.svg
|
||||
:target: https://github.com/hathach/tinyusb/actions
|
||||
.. |Documentation Status| image:: https://readthedocs.org/projects/tinyusb/badge/?version=latest
|
||||
:target: https://docs.tinyusb.org/en/latest/?badge=latest
|
||||
.. |Fuzzing Status| image:: https://oss-fuzz-build-logs.storage.googleapis.com/badges/tinyusb.svg
|
||||
:target: https://oss-fuzz-build-logs.storage.googleapis.com/index.html#tinyusb
|
||||
.. |License| image:: https://img.shields.io/badge/license-MIT-brightgreen.svg
|
||||
:target: https://opensource.org/licenses/MIT
|
||||
|
||||
|
||||
.. _Uses: docs/info/uses.rst
|
||||
.. _Changelog: docs/info/changelog.rst
|
||||
.. _Contributors: CONTRIBUTORS.rst
|
||||
.. _Reference: docs/reference/index.rst
|
||||
.. _Supported Devices: docs/reference/supported.rst
|
||||
.. _Getting Started: docs/reference/getting_started.rst
|
||||
.. _Dependencies: docs/reference/dependencies.rst
|
||||
.. _Concurrency: docs/reference/concurrency.rst
|
||||
.. _Contributing: docs/contributing/index.rst
|
||||
.. _Code of Conduct: CODE_OF_CONDUCT.rst
|
||||
.. _Structure: docs/contributing/structure.rst
|
||||
.. _Porting: docs/contributing/porting.rst
|
||||
11
SConscript
Normal file
11
SConscript
Normal file
@ -0,0 +1,11 @@
|
||||
# RT-Thread building script for bridge
|
||||
|
||||
import os
|
||||
from building import *
|
||||
|
||||
objs = []
|
||||
cwd = GetCurrentDir()
|
||||
|
||||
objs = objs + SConscript(cwd + '/lib/rt-thread/SConscript')
|
||||
|
||||
Return('objs')
|
||||
21
docs/assets/adafruit_logo.svg
Normal file
21
docs/assets/adafruit_logo.svg
Normal file
{kind=link}
@ -0,0 +1,21 @@
|
||||
<svg xmlns="http://www.w3.org/2000/svg" xmlns:xlink="http://www.w3.org/1999/xlink" version="1.1" id="Layer_1" x="0px" y="0px" style="enable-background:new 0 0 1382 768;" xml:space="preserve" width="144" height="80" viewBox="14 12.81 1350 455.81">
|
||||
<style type="text/css">
|
||||
.st0{fill:#0;}
|
||||
</style>
|
||||
<rect x="0" y="0" width="1382" height="768" fill="#fff"/>
|
||||
<g>
|
||||
<g>
|
||||
<g>
|
||||
<path class="st0" d="M402.26,321.44c6.2-6.18,13.5-8.71,27.53-8.71h56.48c15.72,0,25,2.79,30.63,8.71 c7.04,6.99,9.28,15.16,9.28,41.28v104.52h-43v-17.68c-18.55,15.16-25.28,17.96-39.05,17.96h-21.09 c-13.76,0-21.07-1.68-27.24-7.83c-5.35-5.37-8.97-14.36-8.97-34.57c0-19.11,2.79-30.92,9.56-37.67c7-7.02,15.99-10.4,43.79-10.4 c14.91,0,30.36,1.71,43.01,4.5v-13.77c0-15.17-0.85-18.26-2.82-20.51c-1.98-1.71-4.78-2.28-11.24-2.28h-21.62 c-5.91,0-9.01,0.57-10.7,2.28c-2.24,2.25-2.53,5.34-3.09,14.61h-40.71C393.27,336.06,395.8,327.58,402.26,321.44z M483.18,428.75 v-25.84h-28.36c-16.32,0-20.25,1.12-23.06,3.91c-2.79,2.84-3.36,6.2-3.36,13.23c0,7.88,0.57,12.08,2.81,14.34 c2.25,2.22,5.33,2.5,10.95,2.5h12.07C463.24,436.88,469.13,436.06,483.18,428.75z"/>
|
||||
<path class="st0" d="M642.16,467.24V447.3c-19.39,16.87-26.14,20.23-38.79,20.23h-16.28c-16.32,0-25.01-2.8-31.74-9.54 c-9.26-9.26-12.93-22.78-12.93-68.01c0-45.52,4.47-58.42,14.03-67.99c6.76-6.72,15.73-9.53,31.18-9.53h16.86 c12.92,0,19.95,2.81,37.67,17.69V259.9h43v207.34H642.16z M642.16,426.5v-73.6c-9.01-4.21-15.47-6.17-22.49-6.17h-15.43 c-7.88,0-11.57,1.11-14.08,3.64c-3.93,3.64-5.03,10.13-5.03,39.6c0,29.5,1.11,35.7,5.03,39.65c2.51,2.5,6.2,3.37,14.08,3.37 h14.02C625.57,432.99,632.58,431,642.16,426.5z"/>
|
||||
<path class="st0" d="M716.83,321.44c6.17-6.18,13.49-8.71,27.52-8.71h56.49c15.73,0,24.99,2.79,30.64,8.71 c7.01,6.99,9.26,15.16,9.26,41.28v104.52h-43v-17.68c-18.54,15.16-25.29,17.96-39.05,17.96h-21.05 c-13.78,0-21.11-1.68-27.26-7.83c-5.35-5.37-9.01-14.36-9.01-34.57c0-19.11,2.81-30.92,9.56-37.67 c7.03-7.02,16.02-10.4,43.83-10.4c14.91,0,30.34,1.71,42.99,4.5v-13.77c0-15.17-0.84-18.26-2.81-20.51 c-1.94-1.71-4.79-2.28-11.24-2.28h-21.63c-5.91,0-8.99,0.57-10.67,2.28c-2.27,2.25-2.53,5.34-3.12,14.61h-40.72 C707.84,336.06,710.38,327.58,716.83,321.44z M797.74,428.75v-25.84h-28.35c-16.31,0-20.26,1.12-23.05,3.91 c-2.81,2.84-3.38,6.2-3.38,13.23c0,7.88,0.57,12.08,2.82,14.34c2.24,2.22,5.32,2.5,10.95,2.5h12.06 C777.8,436.88,783.7,436.06,797.74,428.75z"/>
|
||||
<path class="st0" d="M856.96,467.24V305.41c0-19.39,2.55-29.52,9.01-35.96c6.47-6.46,13.77-9.55,30.34-9.55h35.41v32.57h-20.82 c-5.6,0-7.28,0.57-8.96,1.96c-1.42,1.71-1.96,4.75-1.96,12.38v6.19h31.75v33.44h-31.48v120.79H856.96z"/>
|
||||
<path class="st0" d="M947.94,467.24V312.72h42.96v23.59c16.04-16.59,24.17-23.87,36.53-23.87H1044v42.42h-19.94 c-11.79,0-20.78,1.11-33.16,6.17v106.2H947.94z"/>
|
||||
<path class="st0" d="M1199.3,312.72v154.52h-43.27v-20.48c-19.66,17.69-26.13,20.77-40.18,20.77h-18.82 c-13.49,0-21.92-2.8-27.79-8.71c-6.2-6.46-9-14.59-9-37.1v-109h43.27v104.24c0,6.44,0.83,10.11,3.36,12.66 c2.53,2.5,5.06,3.37,12.64,3.37h12.39c7.28,0,13.77-1.71,24.13-6.2V312.72H1199.3z"/>
|
||||
<path class="st0" d="M1257.74,291.34h-42.42V259.9h42.42V291.34z M1257.74,467.24h-42.42V312.72h42.42V467.24z"/>
|
||||
<path class="st0" d="M1349,433.26h-18.53c-7.06,0-9.86-0.59-11.24-1.7c-1.42-1.69-1.98-3.93-1.98-10.68v-74.44H1349v-33.72 h-31.75v-21.38h-43.27v21.38v33.72v85.97c0,15.73,1.96,22.76,7.03,27.81c5.34,5.35,13.19,8.4,27.82,8.4 c11.51,0,23.04-1.68,29.78-3.36l10.39-2.7V433.26z"/>
|
||||
</g>
|
||||
</g>
|
||||
<path class="st0" d="M469.56,213.53c-1.48-9.33-6.54-12.01-18.77-15.91c-9.28-2.98-71.47-22.79-71.47-22.79 s-43.35-16.38-75.48,6.78c-4.32,3.13-8.81,6.68-13.31,10.47c3.78-4.5,7.34-8.99,10.45-13.31c23.09-32.18,6.65-75.5,6.65-75.5 s-19.91-62.13-22.92-71.44c-3.93-12.2-6.6-17.27-15.94-18.72c-9.36-1.48-13.45,2.5-20.94,12.92c-5.71,7.91-43.77,60.94-43.77,60.94 s-28.94,36.16-16.87,73.88c1.64,5.06,3.63,10.43,5.86,15.89c-3.13-5-6.3-9.76-9.46-14.05c-23.47-31.89-69.73-29.66-69.73-29.66 s-65.26-0.26-75.02-0.27c-12.83-0.05-18.46,0.95-22.76,9.37c-4.29,8.42-1.75,13.57,5.83,23.9c5.76,7.88,44.44,60.45,44.44,60.45 s25.44,38.72,65.03,38.88c5.32,0.03,11.02-0.22,16.88-0.64c-5.69,1.42-11.19,2.98-16.24,4.64c-37.59,12.46-49.74,57.17-49.74,57.17 s-20.42,61.99-23.46,71.27c-3.98,12.18-4.79,17.84,1.9,24.51c6.69,6.7,12.36,5.87,24.53,1.85c9.27-3.03,71.24-23.58,71.24-23.58 s44.66-12.24,57.04-49.85c1.68-5.06,3.2-10.55,4.63-16.22c-0.42,5.84-0.64,11.53-0.6,16.85c0.21,39.6,38.98,64.98,38.98,64.98 s52.64,38.55,60.52,44.31c10.37,7.55,15.5,10.08,23.93,5.78c8.41-4.3,9.39-9.93,9.33-22.77c-0.04-9.75-0.43-75.01-0.43-75.01 s2.18-46.27-29.76-69.68c-4.3-3.15-9.05-6.31-14.03-9.41c5.44,2.19,10.79,4.18,15.87,5.77c37.72,12.03,73.85-16.98,73.85-16.98 s52.94-38.15,60.85-43.87C467.06,226.99,471.04,222.86,469.56,213.53z M244.76,165.48c7.13,1.11,10.66,16.26,7.87,33.82 c-2.75,17.56-10.75,30.88-17.88,29.76c-7.11-1.13-10.65-16.26-7.89-33.82C229.63,177.69,237.64,164.36,244.76,165.48z M153.6,212.02c3.25-6.43,18.75-5.09,34.57,2.96c15.85,8.05,26.05,19.8,22.78,26.22c-3.27,6.41-18.75,5.1-34.59-2.95 C160.52,230.2,150.33,218.45,153.6,212.02z M201.66,299.59c-12.56,12.58-26.87,18.63-31.96,13.54 c-5.11-5.09,0.94-19.41,13.49-31.99c12.55-12.59,26.86-18.65,31.97-13.56C220.27,272.68,214.23,287.01,201.66,299.59z M270.82,329.06c-6.43,3.27-18.19-6.89-26.26-22.71c-8.08-15.84-9.43-31.34-3-34.61c6.41-3.27,18.15,6.9,26.24,22.73 C275.88,310.29,277.25,325.78,270.82,329.06z M287.49,255.75c-17.55,2.81-32.7-0.71-33.83-7.82c-1.13-7.12,12.18-15.16,29.74-17.95 c17.54-2.79,32.69,0.71,33.82,7.82C318.35,244.91,305.05,252.96,287.49,255.75z"/>
|
||||
</g>
|
||||
</svg>
|
||||
|
After Width: | Height: | Size: 5.5 KiB |
18
docs/assets/logo.svg
Normal file
18
docs/assets/logo.svg
Normal file
{kind=link}
@ -0,0 +1,18 @@
|
||||
<?xml version="1.0" encoding="UTF-8"?>
|
||||
<svg width="280" height="140" version="1.1" viewBox="0 0 74.083 37.042" xmlns="http://www.w3.org/2000/svg">
|
||||
<g transform="translate(-60.931 -79.245)">
|
||||
<g transform="matrix(1.0442 0 0 1.1531 -27.105 33.588)" fill="#fff">
|
||||
<path d="m86.972 39.594c-1.4683 3.2e-5 -2.6588 1.181-2.66 2.6384v26.844c3.3e-5 1.4583 1.1909 2.6404 2.66 2.6404h65.63c1.469-3.2e-5 2.66-1.1822 2.66-2.6404v-26.844c-1e-3 -1.4575-1.1917-2.6384-2.66-2.6384z" color="#000000" fill="#fff" style="-inkscape-stroke:none"/>
|
||||
</g>
|
||||
<g transform="matrix(.35278 0 0 -.35278 -160.36 421.93)" fill="#231f20">
|
||||
<path transform="translate(672.09 955.48)" d="m0 0h-21.484v-12.601h-5.349v-6.436h5.349v-25.383c0-11.331 7.252-13.87 17.223-13.87 4.352 0 8.613 0.272 12.873 0.907v6.073c-0.816-0.09-2.266-0.362-3.535-0.362-3.807 0-5.077 0.816-5.077 4.896v27.739h8.612v6.436h-8.612z"/>
|
||||
<path transform="translate(693.61 925.33)" d="m0 0h-0.049c-1.518 0-2.165-0.896-2.165-2.24v-0.05h4.504v0.05c0 1.344-0.771 2.24-2.29 2.24"/>
|
||||
<path transform="translate(700.92 925.5)" d="m0 0h-0.124c-1.443 0-2.265-0.995-2.265-2.389v-0.074h4.654v0.074c0 1.394-0.822 2.389-2.265 2.389"/>
|
||||
<path transform="translate(750.09 943.78)" d="m0 0c-6.165 0-11.876-2.267-14.505-5.893v4.986h-20.578v-45.326h21.484v36.533c1.27 0.272 2.449 0.453 3.717 0.453 4.715 0 5.44-2.538 5.44-6.436v-30.55h21.484v30.278c0 11.694-7.523 15.955-17.042 15.955"/>
|
||||
<path transform="translate(811.83 942.88)" d="m0 0-10.516-23.57-11.784 23.57h-23.388l24.204-48.046-6.799-15.411h8.249l28.193 63.457z"/>
|
||||
<path transform="translate(706 920)" d="m0 0h-17.421v2.637c0 2.938 1.194 5.675 4.43 5.675h0.124c2.24 0 3.335-1.269 3.932-2.514 0.647 1.469 1.667 2.738 3.883 2.738h0.224c3.086 0 4.828-2.39 4.828-5.774zm-0.598-9.412h-3.16c0.622 1.07 0.971 1.917 0.971 2.737 0 0.871-0.424 1.618-1.493 1.618h-0.05c-0.797 0-1.394-0.249-3.037-1.692-2.339-2.065-3.459-2.912-5.574-2.912h-0.05c-2.787 0-4.555 1.816-4.555 4.231 0 1.219 0.175 1.941 0.548 2.687h3.161c-0.548-0.945-0.797-1.518-0.797-2.314 0-0.845 0.548-1.568 1.493-1.568h0.05c0.821 0 1.12 0.25 2.788 1.692 2.762 2.39 3.832 2.912 5.824 2.912h0.048c2.739 0 4.555-1.917 4.555-4.305 0-1.195-0.298-2.215-0.722-3.086m-4.479-10.93h-12.344v3.011h12.643c1.567 0 2.189 0.548 2.189 1.319 0 0.772-0.622 1.32-2.189 1.32h-12.643v3.01h12.344c3.658 0 5.301-1.841 5.301-4.33 0-2.488-1.643-4.33-5.301-4.33m-9.641 53.817h12.114v-10.601h-12.114zm14.114 2h-16.114v-12.601h-2.685v-45.326h21.484v45.326h-2.685z"/>
|
||||
<path d="m692.79 947.02h2.827v2.319h-2.827z"/>
|
||||
<path d="m699.06 947.02h2.826v2.319h-2.826z"/>
|
||||
</g>
|
||||
</g>
|
||||
</svg>
|
||||
|
After Width: | Height: | Size: 2.6 KiB |
1
docs/assets/stack.svg
Normal file
1
docs/assets/stack.svg
Normal file
{kind=link}
File diff suppressed because one or more lines are too long
|
After Width: | Height: | Size: 84 KiB |
213
docs/boards.md
213
docs/boards.md
@ -1,213 +0,0 @@
|
||||
# Boards
|
||||
|
||||
The board support code is only used for self-contained examples and testing. It is not used when TinyUSB is part of a larger project. It is responsible for getting the MCU started and the USB peripheral clocked with minimal of on-board devices
|
||||
- One LED : for status
|
||||
- One Button : to get input from user
|
||||
- One UART : optional for device, but required for host examples
|
||||
|
||||
## Supported Boards
|
||||
|
||||
This code base already had supported for a handful of following boards (sorted alphabetically)
|
||||
|
||||
### Dialog DA146xx
|
||||
|
||||
- [DA14695 Development Kit – USB](https://www.dialog-semiconductor.com/products/da14695-development-kit-usb)
|
||||
- [DA1469x Development Kit – Pro](https://www.dialog-semiconductor.com/products/da14695-development-kit-pro)
|
||||
|
||||
### Espressif ESP32-S2
|
||||
|
||||
- Adafruit Feather ESP32-S2
|
||||
- [Adafruit Magtag 2.9" E-Ink WiFi Display](https://www.adafruit.com/product/4800)
|
||||
- [Adafruit Metro ESP32-S2](https://www.adafruit.com/product/4775)
|
||||
- [ESP32-S2-Kaluga-1](https://docs.espressif.com/projects/esp-idf/en/latest/esp32s2/hw-reference/esp32s2/user-guide-esp32-s2-kaluga-1-kit.html)
|
||||
- [ESP32-S2-Saola-1](https://docs.espressif.com/projects/esp-idf/en/latest/esp32s2/hw-reference/esp32s2/user-guide-saola-1-v1.2.html)
|
||||
|
||||
### MicroChip SAMD11 & SAMD21
|
||||
|
||||
- [Adafruit Circuit Playground Express](https://www.adafruit.com/product/3333)
|
||||
- [Adafruit Feather M0 Express](https://www.adafruit.com/product/3403)
|
||||
- [Adafruit ItsyBitsy M0 Express](https://www.adafruit.com/product/3727)
|
||||
- [Adafruit Metro M0 Express](https://www.adafruit.com/product/3505)
|
||||
- [Great Scott Gadgets LUNA](https://greatscottgadgets.com/luna/)
|
||||
- [Microchip SAMD11 Xplained Pro](https://www.microchip.com/developmenttools/ProductDetails/atsamd11-xpro)
|
||||
- [Microchip SAMD21 Xplained Pro](https://www.microchip.com/DevelopmentTools/ProductDetails/ATSAMD21-XPRO)
|
||||
- [Seeeduino Xiao](https://www.seeedstudio.com/Seeeduino-XIAO-Arduino-Microcontroller-SAMD21-Cortex-M0+-p-4426.html)
|
||||
|
||||
### MicroChip SAMD51 & SAME54
|
||||
|
||||
- [Adafruit Feather M4 Express](https://www.adafruit.com/product/3857)
|
||||
- [Adafruit ItsyBitsy M4 Express](https://www.adafruit.com/product/3800)
|
||||
- [Adafruit PyBadge](https://www.adafruit.com/product/4200)
|
||||
- [Adafruit PyPortal](https://www.adafruit.com/product/4116)
|
||||
- [Adafruit Metro M4 Express](https://www.adafruit.com/product/3382)
|
||||
- [D5035-01](https://github.com/RudolphRiedel/USB_CAN-FD)
|
||||
- [Microchip SAME54 Xplained Pro](https://www.microchip.com/developmenttools/productdetails/atsame54-xpro)
|
||||
|
||||
### MicroChip SAMG
|
||||
|
||||
- [Microchip SAMG55 Xplained Pro](https://www.microchip.com/DevelopmentTools/ProductDetails/PartNO/ATSAMG55-XPRO)
|
||||
|
||||
### MicroChip SAML22
|
||||
|
||||
- [SAML22 Feather](https://github.com/joeycastillo/Feather-Projects/tree/main/SAML22%20Feather)
|
||||
- [Sensor Watch](https://github.com/joeycastillo/Sensor-Watch)
|
||||
|
||||
### Nordic nRF5x
|
||||
|
||||
- [Adafruit Circuit Playground Bluefruit](https://www.adafruit.com/product/4333)
|
||||
- [Adafruit CLUE](https://www.adafruit.com/product/4500)
|
||||
- [Adafruit Feather nRF52840 Express](https://www.adafruit.com/product/4062)
|
||||
- [Adafruit Feather nRF52840 Sense](https://www.adafruit.com/product/4516)
|
||||
- [Adafruit ItsyBitsy nRF52840 Express](https://www.adafruit.com/product/4481)
|
||||
- [Arduino Nano 33 BLE](https://store.arduino.cc/usa/nano-33-ble)
|
||||
- [Arduino Nano 33 BLE Sense](https://store.arduino.cc/usa/nano-33-ble-sense)
|
||||
- [Maker Diary nRF52840 MDK Dongle](https://wiki.makerdiary.com/nrf52840-mdk-usb-dongle)
|
||||
- [Nordic nRF52840 Development Kit (aka pca10056)](https://www.nordicsemi.com/Software-and-Tools/Development-Kits/nRF52840-DK)
|
||||
- [Nordic nRF52840 Dongle (aka pca10059)](https://www.nordicsemi.com/Software-and-Tools/Development-Kits/nRF52840-Dongle)
|
||||
- [Nordic nRF52833 Development Kit (aka pca10100)](https://www.nordicsemi.com/Software-and-Tools/Development-Kits/nRF52833-DK)
|
||||
- [Raytac MDBT50Q-RX Dongle](https://www.raytac.com/product/ins.php?index_id=89)
|
||||
|
||||
### Nuvoton
|
||||
|
||||
- NuTiny SDK NUC120
|
||||
- [NuTiny NUC121S](https://direct.nuvoton.com/en/nutiny-nuc121s)
|
||||
- [NuTiny NUC125S](https://direct.nuvoton.com/en/nutiny-nuc125s)
|
||||
- [NuTiny NUC126V](https://direct.nuvoton.com/en/nutiny-nuc126v)
|
||||
- [NuTiny SDK NUC505Y](https://direct.nuvoton.com/en/nutiny-nuc505y)
|
||||
|
||||
### NXP iMX RT
|
||||
|
||||
- [MIMX RT1010 Evaluation Kit](https://www.nxp.com/design/development-boards/i.mx-evaluation-and-development-boards/i.mx-rt1010-evaluation-kit:MIMXRT1010-EVK)
|
||||
- [MIMX RT1015 Evaluation Kit](https://www.nxp.com/design/development-boards/i.mx-evaluation-and-development-boards/i.mx-rt1015-evaluation-kit:MIMXRT1015-EVK)
|
||||
- [MIMX RT1020 Evaluation Kit](https://www.nxp.com/design/development-boards/i.mx-evaluation-and-development-boards/i.mx-rt1020-evaluation-kit:MIMXRT1020-EVK)
|
||||
- [MIMX RT1050 Evaluation Kit](https://www.nxp.com/design/development-boards/i.mx-evaluation-and-development-boards/i.mx-rt1050-evaluation-kit:MIMXRT1050-EVK)
|
||||
- [MIMX RT1060 Evaluation Kit](https://www.nxp.com/design/development-boards/i.mx-evaluation-and-development-boards/mimxrt1060-evk-i.mx-rt1060-evaluation-kit:MIMXRT1060-EVK)
|
||||
- [MIMX RT1064 Evaluation Kit](https://www.nxp.com/design/development-boards/i.mx-evaluation-and-development-boards/mimxrt1064-evk-i.mx-rt1064-evaluation-kit:MIMXRT1064-EVK)
|
||||
- [Teensy 4.0 Development Board](https://www.pjrc.com/store/teensy40.html)
|
||||
|
||||
### NXP Kinetis
|
||||
|
||||
- [FRDM-KL25Z](https://www.nxp.com/design/development-boards/freedom-development-boards/mcu-boards/freedom-development-platform-for-kinetis-kl14-kl15-kl24-kl25-mcus:FRDM-KL25Z)
|
||||
|
||||
### NXP LPC 11-13-15
|
||||
|
||||
- [LPCXpresso 11u37](https://www.nxp.com/design/microcontrollers-developer-resources/lpcxpresso-boards/lpcxpresso-board-for-lpc11u37h:OM13074)
|
||||
- [LPCXpresso 11u68](https://www.nxp.com/support/developer-resources/evaluation-and-development-boards/lpcxpresso-boards/lpcxpresso-board-for-lpc11u68:OM13058)
|
||||
- [LPCXpresso 1347](https://www.nxp.com/support/developer-resources/evaluation-and-development-boards/lpcxpresso-boards/lpcxpresso-board-for-lpc1347:OM13045)
|
||||
- [LPCXpresso 1549](https://www.nxp.com/products/processors-and-microcontrollers/arm-microcontrollers/general-purpose-mcus/lpc1500-cortex-m3/lpcxpresso-board-for-lpc1549:OM13056)
|
||||
|
||||
### NXP LPC 17-40
|
||||
|
||||
- [ARM mbed LPC1768](https://www.nxp.com/products/processors-and-microcontrollers/arm-microcontrollers/general-purpose-mcus/lpc1700-cortex-m3/arm-mbed-lpc1768-board:OM11043)
|
||||
- [Embedded Artists LPC4088 Quick Start board](https://www.embeddedartists.com/products/lpc4088-quickstart-board)
|
||||
- [LPCXpresso 1769](https://www.nxp.com/support/developer-resources/evaluation-and-development-boards/lpcxpresso-boards/lpcxpresso-board-for-lpc1769:OM13000)
|
||||
|
||||
### NXP LPC 18-43
|
||||
|
||||
- [Embedded Artists LPC4357 Developer Kit](http://www.embeddedartists.com/products/kits/lpc4357_kit.php)
|
||||
- [Keil MCB1800 Evaluation Board](http://www.keil.com/mcb1800)
|
||||
- [LPCXpresso18S37 Development Board](https://www.nxp.com/products/processors-and-microcontrollers/arm-microcontrollers/general-purpose-mcus/lpc4000-cortex-m4/lpcxpresso18s37-development-board:OM13076)
|
||||
- [NGX LPC4330-Xplorer](https://www.nxp.com/design/designs/lpc4330-xplorer-board:OM13027)
|
||||
|
||||
### NXP LPC 51
|
||||
- [LPCXpresso 51U68](https://www.nxp.com/products/processors-and-microcontrollers/arm-microcontrollers/general-purpose-mcus/lpcxpresso51u68-for-the-lpc51u68-mcus:OM40005)
|
||||
|
||||
### NXP LPC 54
|
||||
|
||||
- [LPCXpresso 54114](https://www.nxp.com/design/microcontrollers-developer-resources/lpcxpresso-boards/lpcxpresso54114-board:OM13089)
|
||||
|
||||
## NXP LPC55
|
||||
|
||||
- [Double M33 Express](https://www.crowdsupply.com/steiert-solutions/double-m33-express)
|
||||
- [LPCXpresso 55s28 EVK](https://www.nxp.com/design/software/development-software/lpcxpresso55s28-development-board:LPC55S28-EVK)
|
||||
- [LPCXpresso 55s69 EVK](https://www.nxp.com/design/development-boards/lpcxpresso-boards/lpcxpresso55s69-development-board:LPC55S69-EVK)
|
||||
- [MCU-Link](https://www.nxp.com/design/development-boards/lpcxpresso-boards/mcu-link-debug-probe:MCU-LINK)
|
||||
|
||||
### Renesas RX
|
||||
|
||||
- [GR-CITRUS](https://www.renesas.com/us/en/products/gadget-renesas/boards/gr-citrus)
|
||||
|
||||
### Raspberry Pi RP2040
|
||||
|
||||
- [Adafruit Feather RP2040](https://www.adafruit.com/product/4884)
|
||||
- [Adafruit ItsyBitsy RP2040](https://www.adafruit.com/product/4888)
|
||||
- [Adafruit QT Py RP2040](https://www.adafruit.com/product/4900)
|
||||
- [Raspberry Pi Pico](https://www.raspberrypi.org/products/raspberry-pi-pico/)
|
||||
|
||||
### Silabs
|
||||
|
||||
- [EFM32GG12 Thunderboard Kit (SLTB009A)](https://www.silabs.com/development-tools/thunderboard/thunderboard-gg12-kit)
|
||||
|
||||
### Sony
|
||||
|
||||
- [Sony Spresense CXD5602](https://developer.sony.com/develop/spresense)
|
||||
|
||||
### ST STM32
|
||||
|
||||
- [Adafruit Feather STM32F405](https://www.adafruit.com/product/4382)
|
||||
- [Micro Python PyBoard v1.1](https://store.micropython.org/product/PYBv1.1)
|
||||
- [STLink-V3 Mini](https://www.st.com/en/development-tools/stlink-v3mini.html)
|
||||
- [STM32 L035c8 Discovery](https://www.st.com/en/evaluation-tools/32l0538discovery.html)
|
||||
- [STM32 L4R5zi Nucleo](https://www.st.com/en/evaluation-tools/nucleo-l4r5zi.html)
|
||||
- [STM32 F070rb Nucleo](https://www.st.com/en/evaluation-tools/nucleo-f070rb.html)
|
||||
- [STM32 F072 Evaluation](https://www.st.com/en/evaluation-tools/stm32072b-eval.html)
|
||||
- [STM32 F072rb Discovery](https://www.st.com/en/evaluation-tools/32f072bdiscovery.html)
|
||||
- STM32 F103c Blue Pill
|
||||
- [STM32 F207zg Nucleo](https://www.st.com/en/evaluation-tools/nucleo-f207zg.html)
|
||||
- [STM32 F303vc Discovery](https://www.st.com/en/evaluation-tools/stm32f3discovery.html)
|
||||
- STM32 F401cc Black Pill
|
||||
- [STM32 F407vg Discovery](https://www.st.com/en/evaluation-tools/stm32f4discovery.html)
|
||||
- [STM32 F411ce Black Pill](https://www.adafruit.com/product/4877)
|
||||
- [STM32 F411ve Discovery](https://www.st.com/en/evaluation-tools/32f411ediscovery.html)
|
||||
- [STM32 F412zg Discovery](https://www.st.com/en/evaluation-tools/32f412gdiscovery.html)
|
||||
- [STM32 F723e Discovery](https://www.st.com/en/evaluation-tools/32f723ediscovery.html)
|
||||
- [STM32 F746zg Nucleo](https://www.st.com/en/evaluation-tools/nucleo-f746zg.html)
|
||||
- [STM32 F746g Discovery](https://www.st.com/en/evaluation-tools/32f746gdiscovery.html)
|
||||
- [STM32 F767zi Nucleo](https://www.st.com/en/evaluation-tools/nucleo-f767zi.html)
|
||||
- [STM32 F769i Discovery](https://www.st.com/en/evaluation-tools/32f769idiscovery.html)
|
||||
- [STM32 H743zi Nucleo](https://www.st.com/en/evaluation-tools/nucleo-h743zi.html)
|
||||
- [STM32 H743i Evaluation](https://www.st.com/en/evaluation-tools/stm32h743i-eval.html)
|
||||
- [STM32 H745i Discovery](https://www.st.com/en/evaluation-tools/stm32h745i-disco.html)
|
||||
|
||||
### TI
|
||||
|
||||
- [MSP430F5529 USB LaunchPad Evaluation Kit](http://www.ti.com/tool/MSP-EXP430F5529LP)
|
||||
|
||||
### Tomu
|
||||
|
||||
- [Fomu](https://www.crowdsupply.com/sutajio-kosagi/fomu)
|
||||
|
||||
## Add your own board
|
||||
|
||||
If you don't possess any of supported board above. Don't worry you can easily implemented your own one by following this guide as long as the mcu is supported.
|
||||
|
||||
- Create new makefile for your board at `hw/bsp/<board name>/board.mk` and linker file as well if needed.
|
||||
- Create new source file for your board at `hw/bsp/<board name>/<board name>.c` and implement following APIs
|
||||
|
||||
### Board APIs
|
||||
|
||||
#### board_init()
|
||||
|
||||
Is responsible for starting the MCU, setting up the USB clock and USB pins. It is also responsible for initializing LED and button pins.
|
||||
One useful clock debugging technique is to set up a PWM output at a known value such as 500hz based on the USB clock so that you can verify it is correct with a logic probe or oscilloscope.
|
||||
Setup your USB in a crystal-less mode when available. That makes the code easier to port across boards.
|
||||
|
||||
#### board_led_write()
|
||||
|
||||
Set the pin corresponding to the led to output a value that lights the LED when `state` is true.
|
||||
|
||||
#### board_button_read()
|
||||
|
||||
Return current state of button, a `1` means active (pressed), a `0` means inactive.
|
||||
|
||||
#### board_millis()
|
||||
|
||||
The function returns the elapsed number of milliseconds since startup. On ARM this is commonly done with SysTick or Timer. This provide examples a way to measure time to blink LED or delay properly. It is only required when run examples without RTOS `CFG_TUSB_OS == OPT_OS_NONE`.
|
||||
|
||||
#### board_uart_read()
|
||||
|
||||
Get characters from UART peripheral.
|
||||
|
||||
#### board_uart_write()
|
||||
|
||||
Send characters to UART peripheral.
|
||||
@ -1,468 +0,0 @@
|
||||
# TinyUSB Changelog
|
||||
|
||||
## 0.10.1 - 2021.06.03
|
||||
|
||||
- rework rp2040 examples and CMake build, allow better integration with pico-sdk
|
||||
|
||||
### Host Controller Driver (HCD)
|
||||
|
||||
- Fix rp2040 host driver: incorrect PID with low speed device with max packet size of 8 bytes
|
||||
- Improve hub driver
|
||||
- Remove obsolete hcd_pipe_queue_xfer()/hcd_pipe_xfer()
|
||||
- Use hcd_frame_number() instead of micro frame
|
||||
- Fix OHCI endpoint address and xferred_bytes in xfer complete event
|
||||
|
||||
## 0.10.0 - 2021.05.28
|
||||
|
||||
- Rework tu_fifo_t with separated mutex for read and write, better support DMA with read/write buffer info. And constant address mode
|
||||
- Improve audio_test example and add audio_4_channel_mic example
|
||||
- Add new dfu example
|
||||
- Remove pico-sdk from submodule
|
||||
|
||||
### Device Controller Driver (DCD)
|
||||
|
||||
- Add new DCD port for Silabs EFM32GG12 with board Thunderboard Kit (SLTB009A)
|
||||
- Add new DCD port Renesas RX63N, board GR-CITRUS
|
||||
- Add new (optional) endpoint API dcd_edpt_xfer_fifo
|
||||
- Fix build with nRF5340
|
||||
- Fix build with lpc15 and lpc54
|
||||
- Fix build with lpc177x_8x
|
||||
- STM32 Synopsys: greatly improve Isochronous transfer with edpt_xfer_fifo API
|
||||
- Support LPC55 port1 highspeed
|
||||
- Add support for Espressif esp32s3
|
||||
- nRF: fix race condition that could cause drop packet of Bulk OUT transfer
|
||||
|
||||
### USB Device Driver (USBD)
|
||||
|
||||
- Add new (optional) endpoint ADPI usbd_edpt_xfer_fifo
|
||||
|
||||
### Device Class Driver
|
||||
|
||||
CDC
|
||||
|
||||
- [Breaking] tud_cdc_peek(), tud_vendor_peek() no longer support random offset and dropped position parameter.
|
||||
|
||||
DFU
|
||||
|
||||
- Add new DFU 1.1 class driver (WIP)
|
||||
|
||||
HID
|
||||
|
||||
- Fix keyboard report descriptor template
|
||||
- Add more hid keys constant from 0x6B to 0xA4
|
||||
- [Breaking] rename API
|
||||
- HID_PROTOCOL_NONE/KEYBOARD/MOUST to HID_ITF_PROTOCOL_NONE/KEYBOARD/MOUSE
|
||||
- tud_hid_boot_mode() to tud_hid_get_protocol()
|
||||
- tud_hid_boot_mode_cb() to tud_hid_set_protocol_cb()
|
||||
|
||||
MIDI
|
||||
|
||||
- Fix MIDI buffer overflow issue
|
||||
- [Breaking] rename API
|
||||
- Rename tud_midi_read() to tud_midi_stream_read()
|
||||
- Rename tud_midi_write() to tud_midi_stream_write()
|
||||
- Rename tud_midi_receive() to tud_midi_packet_read()
|
||||
- Rename tud_midi_send() to tud_midi_packet_write()
|
||||
|
||||
### Host Controller Driver (HCD)
|
||||
|
||||
- No noticable changes
|
||||
|
||||
### USB Host Driver (USBH)
|
||||
|
||||
- No noticable changes
|
||||
|
||||
### Host Class Driver
|
||||
|
||||
- HID: Rework host hid driver, basically everything changes
|
||||
|
||||
## 0.9.0 - 2021.03.12
|
||||
|
||||
### Device Stack
|
||||
|
||||
#### Device Controller Driver (DCD)
|
||||
|
||||
RP2040
|
||||
|
||||
- Fix endpoint buffer reallocation overrun problem
|
||||
- Fix osal_pico queue overflow in initialization
|
||||
- Fix Isochronous endpoint buffer size in transfer
|
||||
- Optimize hardware endpoint struct to reduce RAM usage
|
||||
- Fix enum walkaround forever check for SE0 when pull up is disabled
|
||||
|
||||
Sony CXD56
|
||||
|
||||
- Pass the correct speed on Spresense
|
||||
- Fix setup processed flag
|
||||
|
||||
NXP Transdimention
|
||||
|
||||
- Update dcd_init() to reset controller to device mode
|
||||
|
||||
#### USB Device Driver (USBD)
|
||||
|
||||
- Fix issue with status zlp (tud_control_status) is returned by class driver with SET/CLEAR_FEATURE for endpoint.
|
||||
- Correct endpoint size check for fullspeed bulk, can be 8, 16, 32, 64
|
||||
- Ack SET_INTERFACE even if it is not implemented by class driver.
|
||||
|
||||
#### Device Class Driver
|
||||
|
||||
DFU Runtime
|
||||
|
||||
- rename dfu_rt to dfu_runtime for easy reading
|
||||
|
||||
CDC
|
||||
|
||||
- Add tud_cdc_send_break_cb() to support break request
|
||||
- Improve CDC receive, minor behavior changes: when tud_cdc_rx_wanted_cb() is invoked wanted_char may not be the last byte in the fifo
|
||||
|
||||
HID
|
||||
|
||||
- [Breaking] Add itf argument to hid API to support multiple instances, follow API has signature changes
|
||||
- tud_hid_descriptor_report_cb()
|
||||
- tud_hid_get_report_cb()
|
||||
- tud_hid_set_report_cb()
|
||||
- tud_hid_boot_mode_cb()
|
||||
- tud_hid_set_idle_cb()
|
||||
- Add report complete callback tud_hid_report_complete_cb() API
|
||||
- Add DPad/Hat support for HID Gamepad
|
||||
- TUD_HID_REPORT_DESC_GAMEPAD() now support 16 buttons, 2 joysticks, 1 hat/dpad
|
||||
- Add hid_gamepad_report_t along with GAMEPAD_BUTTON_ and GAMEPAD_HAT_ enum
|
||||
- Add Gamepad to hid_composite / hid_composite_freertos example
|
||||
|
||||
MIDI
|
||||
|
||||
- Fix dropping MIDI sysex message when fifo is full
|
||||
- Fix typo in tud_midi_write24(), make example less ambigous for cable and channel
|
||||
- Fix incorrect endpoint descriptor length, MIDI v1 use Audio v1 which has 9-byte endpoint descriptor (instead of 7)
|
||||
|
||||
### Host Stack
|
||||
|
||||
#### Host Controller Driver (HCD)
|
||||
|
||||
- Add rhport to hcd_init()
|
||||
- Improve EHCI/OHCI driver abstraction
|
||||
- Move echi/ohci files to portable/
|
||||
- Rename hcd_lpc18_43 to hcd_transdimension
|
||||
- Sub hcd API with hcd_ehci_init(), hcd_ehci_register_addr()
|
||||
- Update NXP transdimention hcd_init() to reset controller to host mode
|
||||
- Ported hcd to rt10xx
|
||||
|
||||
#### USB Host Driver (USBH)
|
||||
|
||||
- No noticeable changes to usbh
|
||||
|
||||
#### Host Class Driver
|
||||
|
||||
MSC
|
||||
|
||||
- Rename tuh_msc_scsi_inquiry() to tuh_msc_inquiry()
|
||||
- Rename tuh_msc_mounted_cb/tuh_msc_unmounted_cb to tuh_msc_mount_cb/tuh_msc_unmount_cb to match device stack naming
|
||||
- Change tuh_msc_is_busy() to tuh_msc_ready()
|
||||
- Add read10 and write10 function: tuh_msc_read10(), tuh_msc_write10()
|
||||
- Read_Capacity is invoked as part of enumeration process
|
||||
- Add tuh_msc_get_block_count(), tuh_msc_get_block_size()
|
||||
- Add CFG_TUH_MSC_MAXLUN (default to 4) to hold lun capacities
|
||||
|
||||
### Others
|
||||
|
||||
- Add basic support for rt-thread OS
|
||||
- Change zero bitfield length to more explicit padding
|
||||
- Build example now fetch required submodules on the fly while running `make` without prio submodule init for mcu drivers
|
||||
- Update pico-sdk to v1.1.0
|
||||
|
||||
**New Boards**
|
||||
|
||||
- Microchip SAM E54 Xplained Pro
|
||||
- LPCXpresso 55s28
|
||||
- LPCXpresso 18s37
|
||||
|
||||
## 0.8.0 - 2021.02.05
|
||||
|
||||
### Device Controller Driver
|
||||
|
||||
- Added new device support for Raspberry Pi RP2040
|
||||
- Added new device support for NXP Kinetis KL25ZXX
|
||||
- Use dcd_event_bus_reset() with link speed to replace bus_signal
|
||||
- ESP32-S2:
|
||||
- Add bus suspend and wakeup support
|
||||
- SAMD21:
|
||||
- Fix (walkaround) samd21 setup_packet overflow by USB DMA
|
||||
- STM32 Synopsys:
|
||||
- Rework USB FIFO allocation scheme and allow RX FIFO size reduction
|
||||
- Sony CXD56
|
||||
- Update Update Spresense SDK to 2.0.2
|
||||
- Fix dcd issues with setup packets
|
||||
- Correct EP number for cdc_msc example
|
||||
|
||||
### USB Device
|
||||
|
||||
**USBD**
|
||||
|
||||
- Rework usbd control transfer to have additional stage parameter for setup, data, status
|
||||
- Fix tusb_init() return true instead of TUSB_ERROR_NONE
|
||||
- Added new API tud_connected() that return true after device got out of bus reset and received the very first setup packet
|
||||
|
||||
**Class Driver**
|
||||
|
||||
- CDC
|
||||
- Allow to transmit data, even if the host does not support control line states i.e set DTR
|
||||
- HID
|
||||
- change default CFG_TUD_HID_EP_BUFSIZE from 16 to 64
|
||||
- MIDI
|
||||
- Fix midi sysex sending bug
|
||||
- MSC
|
||||
- Invoke only scsi complete callback after status transaction is complete.
|
||||
- Fix scsi_mode_sense6_t padding, which cause IAR compiler internal error.
|
||||
- USBTMC
|
||||
- Change interrupt endpoint example size to 8 instead of 2 for better compatibility with mcu
|
||||
|
||||
**Example**
|
||||
|
||||
- Support make from windows cmd.exe
|
||||
- Add HID Consumer Control (media keys) to hid_composite & hid_composite_freertos examples
|
||||
|
||||
### USB Host
|
||||
|
||||
No noticeable changes to host stack
|
||||
|
||||
### New Boards
|
||||
|
||||
- NXP/Freescale Freedom FRDM-KL25Z
|
||||
- Feather Double M33 express
|
||||
- Raspberry Pi Pico
|
||||
- Adafruit Feather RP2040
|
||||
- Adafruit Itsy Bitsy RP2040
|
||||
- Adafruit QT RP2040
|
||||
- Adfruit Feather ESP32-S2
|
||||
- Adafruit Magtag 29" Eink
|
||||
- Adafruit Metro ESP32-S2
|
||||
- Adafruit PyBadge
|
||||
- Adafruit PyPortal
|
||||
- Great Scott Gadgets' LUNA D11 & D21
|
||||
|
||||
## 0.7.0 - 2020.11.08
|
||||
|
||||
### Device Controller Driver
|
||||
|
||||
- Added new support for Espressif ESP32-S2
|
||||
- Added new support for Dialog DA1469x
|
||||
- Enhance STM32 Synopsys
|
||||
- Support bus events disconnection/suspend/resume/wakeup
|
||||
- Improve transfer performance with optimizing xfer and fifo size
|
||||
- Support Highspeed port (OTG_HS) with both internal and external PHY
|
||||
- Support multiple usb ports with rhport=1 is highspeed on selected MCUs e.g H743, F23. It is possible to have OTG_HS to run on Fullspeed PHY (e.g lacking external PHY)
|
||||
- Add ISO transfer, fix odd/even frame
|
||||
- Fix FIFO flush during stall
|
||||
- Implement dcd_edpt_close() API
|
||||
- Support F105, F107
|
||||
- Enhance STM32 fsdev
|
||||
- Improve dcd fifo allocation
|
||||
- Fix ISTR race condition
|
||||
- Support remap USB IRQ on supported MCUs
|
||||
- Implement dcd_edpt_close() API
|
||||
- Enhance NUC 505: enhance set configure behavior
|
||||
- Enhance SAMD
|
||||
- Fix race condition with setup packet
|
||||
- Add SAMD11 option `OPT_MCU_SAMD11`
|
||||
- Add SAME5x option `OPT_MCU_SAME5X`
|
||||
- Fix SAMG control data toggle and stall race condition
|
||||
- Enhance nRF
|
||||
- Fix hanged when tud_task() is called within critical section (disabled interrupt)
|
||||
- Fix disconnect bus event not submitted
|
||||
- Implement ISO transfer and dcd_edpt_close()
|
||||
|
||||
### USB Device
|
||||
|
||||
**USBD**
|
||||
|
||||
- Add new class driver for **Bluetooth HCI** class driver with example can be found in [mynewt-tinyusb-example](https://github.com/hathach/mynewt-tinyusb-example) since it needs mynewt OS to run with.
|
||||
- Fix USBD endpoint usage racing condition with `usbd_edpt_claim()/usbd_edpt_release()`
|
||||
- Added `tud_task_event_ready()` and `osal_queue_empty()`. This API is needed to check before enter low power mode with WFI/WFE
|
||||
- Rename USB IRQ Handler to `dcd_int_handler()`. Application must define IRQ handler in which it calls this API.
|
||||
- Add `dcd_connect()` and `dcd_disconnect()` to enable/disable internal pullup on D+/D- on supported MCUs.
|
||||
- Add `usbd_edpt_open()`
|
||||
- Remove `dcd_set_config()`
|
||||
- Add *OPT_OS_CUMSTOM* as hook for application to overwrite and/or add their own OS implementation
|
||||
- Support SET_INTERFACE, GET_INTERFACE request
|
||||
- Add Logging for debug with optional uart/rtt/swo printf retarget or `CFG_TUSB_DEBUG_PRINTF` hook
|
||||
- Add IAR compiler support
|
||||
- Support multiple configuration descriptors. `TUD_CONFIG_DESCRIPTOR()` template has extra config_num as 1st argument
|
||||
- Improve USB Highspeed support with actual link speed detection with `dcd_event_bus_reset()`
|
||||
- Enhance class driver management
|
||||
- `usbd_driver_open()` add max length argument, and return length of interface (0 for not supported). Return value is used for finding appropriate driver
|
||||
- Add application implemented class driver via `usbd_app_driver_get_cb()`
|
||||
- IAD is handled to assign driver id
|
||||
- Added `tud_descriptor_device_qualifier_cb()` callback
|
||||
- Optimize `tu_fifo` bulk write/read transfer
|
||||
- Forward non-std control request to class driver
|
||||
- Let application handle Microsoft OS 1.0 Descriptors (the 0xEE index string)
|
||||
- Fix OSAL FreeRTOS yield from ISR
|
||||
|
||||
**Class Drivers**
|
||||
|
||||
- USBNET: remove ACM-EEM due to lack of support from host
|
||||
- USBTMC: fix descriptors when INT EP is disabled
|
||||
- CDC:
|
||||
- Send zero length packet for end of data when needed
|
||||
- Add `tud_cdc_tx_complete_cb()` callback
|
||||
- Change tud_cdc_n_write_flush() return number of bytes forced to transfer, and flush when writing enough data to fifo
|
||||
- MIDI:
|
||||
- Add packet interface
|
||||
- Add multiple jack descriptors
|
||||
- Fix MIDI driver for sysex
|
||||
- DFU Runtime: fix response to SET_INTERFACE and DFU_GETSTATUS request
|
||||
- Rename some configure macro to make it clear that those are used directly for endpoint transfer
|
||||
- CFG_TUD_HID_BUFSIZE to `CFG_TUD_HID_EP_BUFSIZE
|
||||
- CFG_TUD_CDC_EPSIZE to CFG_TUD_CDC_EP_BUFSIZE
|
||||
- CFG_TUD_MSC_BUFSIZE to CFG_TUD_MSC_EP_BUFSIZE
|
||||
- CFG_TUD_MIDI_EPSIZE to CFG_TUD_MIDI_EP_BUFSIZE
|
||||
- HID:
|
||||
- Fix gamepad template descriptor
|
||||
- Add multiple HID interface API
|
||||
- Add extra comma to HID_REPORT_ID
|
||||
|
||||
### USB Host
|
||||
|
||||
- Rework USB host stack (still work in progress)
|
||||
- Fix compile error with pipehandle
|
||||
- Rework usbh control and enumeration as non-blocking
|
||||
- Improve Hub, MSC, HID host driver
|
||||
|
||||
### Examples
|
||||
|
||||
- Add new hid_composite_freertos
|
||||
- Add new dynamic_configuration to demonstrate how to switch configuration descriptors
|
||||
- Add new hid_multiple_interface
|
||||
- Enhance `net_lwip_webserver` example
|
||||
- Add multiple configuration: RNDIS for Windows, CDC-ECM for macOS (Linux will work with both)
|
||||
- Update lwip to STABLE-2_1_2_RELEASE for net_lwip_webserver
|
||||
- Added new Audio example: audio_test uac2_headsest
|
||||
|
||||
### New Boards
|
||||
|
||||
- Espressif ESP32-S2: saola_1, kaluga_1
|
||||
- STM32: F746 Nucleo, H743 Eval, H743 Nucleo, F723 discovery, stlink v3 mini, STM32L4r5 Nucleo
|
||||
- Dialog DA1469x dk pro and dk usb
|
||||
- Microchip: Great Scoot Gadgets' LUNA, samd11_xplained, D5035-01, atsamd21 xplained pro
|
||||
- nRF: ItsyBitsy nRF52840
|
||||
|
||||
## 0.6.0 - 2020.03.30
|
||||
|
||||
Added **CONTRIBUTORS.md** to give proper credit for contributors to the stack. Special thanks to [Nathan Conrad](https://github.com/pigrew), [Peter Lawrence](https://github.com/majbthrd) and [William D. Jones](https://github.com/cr1901) and others for spending their precious time to add lots of features and ports for this release.
|
||||
|
||||
### Added
|
||||
|
||||
**MCUs**
|
||||
|
||||
- Added support for Microchip SAMG55
|
||||
- Added support for Nordic nRF52833
|
||||
- Added support for Nuvoton: NUC120, NUC121/NUC125, NUC126, NUC505
|
||||
- Added support for NXP LPC: 51Uxx, 54xxx, 55xx
|
||||
- Added support for NXP iMXRT: RT1011, RT1015, RT1021, RT1052, RT1062, RT1064
|
||||
- Added support for Sony CXD56 (Spresense)
|
||||
- Added support for STM32: L0, F0, F1, F2, F3, F4, F7, H7
|
||||
- Added support for TI MSP430
|
||||
- Added support for ValentyUSB's eptri
|
||||
|
||||
**Class Driver**
|
||||
|
||||
- Added DFU Runtime class driver
|
||||
- Added Network class driver with RNDIS, CDC-ECM, CDC-EEM (work in progress)
|
||||
- Added USBTMC class driver
|
||||
- Added WebUSB class driver using vendor-specific class
|
||||
- Added multiple instances support for CDC and MIDI
|
||||
- Added a handful of unit test with Ceedling.
|
||||
- Added LOG support for debugging with CFG_TUSB_DEBUG
|
||||
- Added `tud_descriptor_bos_cb()` for BOS descriptor (required for USB 2.1)
|
||||
- Added `dcd_edpt0_status_complete()` as optional API for DCD
|
||||
|
||||
**Examples**
|
||||
|
||||
Following examples are added:
|
||||
|
||||
- board_test
|
||||
- cdc_dual_ports
|
||||
- dfu_rt
|
||||
- hid_composite
|
||||
- net_lwip_webserver
|
||||
- usbtmc
|
||||
- webusb_serial
|
||||
|
||||
**Boards**
|
||||
|
||||
Following boards are added:
|
||||
|
||||
- adafruit_clue
|
||||
- arduino_nano33_ble
|
||||
- circuitplayground_bluefruit
|
||||
- circuitplayground_express
|
||||
- feather_m0_express
|
||||
- feather_nrf52840_sense
|
||||
- feather_stm32f405
|
||||
- fomu
|
||||
- itsybitsy_m0
|
||||
- itsybitsy_m4
|
||||
- lpcxpresso11u37
|
||||
- lpcxpresso1549
|
||||
- lpcxpresso51u68
|
||||
- lpcxpresso54114
|
||||
- lpcxpresso55s69
|
||||
- mbed1768
|
||||
- mimxrt1010_evk
|
||||
- mimxrt1015_evk
|
||||
- mimxrt1020_evk
|
||||
- mimxrt1050_evkb
|
||||
- mimxrt1060_evk
|
||||
- mimxrt1064_evk
|
||||
- msp_exp430f5529lp
|
||||
- ngx4330
|
||||
- nrf52840_mdk_dongle
|
||||
- nutiny_nuc121s
|
||||
- nutiny_nuc125s
|
||||
- nutiny_nuc126v
|
||||
- nutiny_sdk_nuc120
|
||||
- nutiny_sdk_nuc505
|
||||
- pca10059
|
||||
- pca10100
|
||||
- pyboardv11
|
||||
- raytac_mdbt50q_rx
|
||||
- samg55xplained
|
||||
- seeeduino_xiao
|
||||
- spresense
|
||||
- stm32f070rbnucleo
|
||||
- stm32f072disco
|
||||
- stm32f103bluepill
|
||||
- stm32f207nucleo
|
||||
- stm32f401blackpill
|
||||
- stm32f411blackpill
|
||||
- stm32f411disco
|
||||
- stm32f412disco
|
||||
- stm32f767nucleo
|
||||
- stm32h743nucleo
|
||||
- stm32l0538disco
|
||||
- stm32l476disco
|
||||
- teensy_40
|
||||
|
||||
### Changed
|
||||
|
||||
- Changed `tud_descriptor_string_cb()` to have additional Language ID argument
|
||||
- Merged hal_nrf5x.c into dcd_nrf5x.c
|
||||
- Merged dcd_samd21.c and dcd_samd51.c into dcd_samd.c
|
||||
- Generalized dcd_stm32f4.c to dcd_synopsys.c
|
||||
- Changed cdc_msc_hid to cdc_msc (drop hid) due to limited endpoints number of some MCUs
|
||||
- Improved DCD SAMD stability, fix missing setup packet occasionally
|
||||
- Improved usbd/usbd_control with proper hanlding of zero-length packet (ZLP)
|
||||
- Improved STM32 DCD FSDev
|
||||
- Improved STM32 DCD Synopsys
|
||||
- Migrated CI from Travis to Github Action
|
||||
- Updated nrfx submodule to 2.1.0
|
||||
- Fixed mynewt osal queue definition
|
||||
- Fixed cdc_msc_freertos example build for all MCUs
|
||||
|
||||
## 0.5.0 (Initial Release) - 2019.07.10
|
||||
|
||||
First release, device stack works great, host stack works but still need improvement.
|
||||
- Special thanks to @adafruit team, especially @tannewt to help out immensely to rework device stack: simplify osal & control transfer, adding SAMD21/SAMD51 ports, writing porting docs, adding MIDI class support etc...
|
||||
- Thanks to @cr1901 for adding STM32F4 port.
|
||||
- Thanks to @PTS93 and @todbot for HID raw API
|
||||
41
docs/conf.py
Normal file
41
docs/conf.py
Normal file
@ -0,0 +1,41 @@
|
||||
# Configuration file for the Sphinx documentation builder.
|
||||
#
|
||||
# This file only contains a selection of the most common options. For a full
|
||||
# list see the documentation:
|
||||
# https://www.sphinx-doc.org/en/master/usage/configuration.html
|
||||
|
||||
# -- Path setup --------------------------------------------------------------
|
||||
|
||||
|
||||
# -- Project information -----------------------------------------------------
|
||||
|
||||
project = 'TinyUSB'
|
||||
copyright = '2021, Ha Thach'
|
||||
author = 'Ha Thach'
|
||||
|
||||
|
||||
# -- General configuration ---------------------------------------------------
|
||||
|
||||
extensions = [
|
||||
'sphinx.ext.autodoc',
|
||||
'sphinx.ext.intersphinx',
|
||||
'sphinx.ext.todo',
|
||||
'sphinx_autodoc_typehints',
|
||||
]
|
||||
|
||||
templates_path = ['_templates']
|
||||
|
||||
exclude_patterns = ['_build']
|
||||
|
||||
|
||||
# -- Options for HTML output -------------------------------------------------
|
||||
|
||||
html_theme = 'furo'
|
||||
html_title = 'TinyUSB'
|
||||
html_logo = 'assets/logo.svg'
|
||||
html_favicon = 'assets/logo.svg'
|
||||
html_theme_options = {
|
||||
'sidebar_hide_name': True,
|
||||
}
|
||||
|
||||
todo_include_todos = True
|
||||
1
docs/contributing/code_of_conduct.rst
Symbolic link
1
docs/contributing/code_of_conduct.rst
Symbolic link
@ -0,0 +1 @@
|
||||
../../CODE_OF_CONDUCT.rst
|
||||
23
docs/contributing/index.rst
Normal file
23
docs/contributing/index.rst
Normal file
@ -0,0 +1,23 @@
|
||||
************
|
||||
Contributing
|
||||
************
|
||||
|
||||
Contributing can be highly rewarding, but it can also be frustrating at times.
|
||||
It takes time to review patches, and as this is an open source project, that
|
||||
sometimes can take a while. The reviewing process depends on the availability
|
||||
of the maintainers, who may not be always available. Please try to be
|
||||
understanding through the process.
|
||||
|
||||
There a few guidelines you need to keep in mind when contributing. Please have
|
||||
a look at them as that will make the contribution process easier for all
|
||||
parties.
|
||||
|
||||
Index
|
||||
=====
|
||||
|
||||
.. toctree::
|
||||
:maxdepth: 2
|
||||
|
||||
code_of_conduct
|
||||
structure
|
||||
porting
|
||||
@ -1,4 +1,7 @@
|
||||
# Porting
|
||||
|
||||
*******
|
||||
Porting
|
||||
*******
|
||||
|
||||
TinyUSB is designed to be a universal USB protocol stack for microcontrollers. It
|
||||
handles most of the high level USB protocol and relies on the microcontroller's USB peripheral for
|
||||
@ -8,129 +11,165 @@ for the microcontroller to other projects, especially those already using TinyUS
|
||||
|
||||
Below are instructions on how to get the cdc_msc device example running on a new microcontroller. Doing so includes adding the common code necessary for other uses while minimizing other extra code. Whenever you see a phrase or word in <> it should be replaced.
|
||||
|
||||
## Register defs
|
||||
Register defs
|
||||
-------------
|
||||
|
||||
The first step to adding support is including the register definitions and startup code for the
|
||||
microcontroller in TinyUSB. We write the TinyUSB implementation against these structs instead of higher level functions to keep the code small and to prevent function name collisions in linking of larger projects. For ARM microcontrollers this is the CMSIS definitions. They should be
|
||||
placed in the `hw/mcu/<vendor>/<chip_family>` directory.
|
||||
placed in the ``hw/mcu/<vendor>/<chip_family>`` directory.
|
||||
|
||||
Once this is done, create a directory in `hw/bsp/<your board name>` for the specific board you are using to test the code. (Duplicating an existing board's directory is the best way to get started.) The board should be a readily available development board so that others can also test.
|
||||
Once this is done, create a directory in ``hw/bsp/<your board name>`` for the specific board you are using to test the code. (Duplicating an existing board's directory is the best way to get started.) The board should be a readily available development board so that others can also test.
|
||||
|
||||
Build
|
||||
-----
|
||||
|
||||
## Build
|
||||
Now that those directories are in place, we can start our iteration process to get the example building successfully. To build, run from the root of TinyUSB:
|
||||
|
||||
`make -C examples/device/cdc_msc BOARD=<board>`
|
||||
``make -C examples/device/cdc_msc BOARD=<board>``
|
||||
|
||||
Unless, you've read ahead, this will fail miserably. Now, lets get it to fail less by updating the files in the board directory. The code in the board's directory is responsible for setting up the microcontroller's clocks and pins so that USB works. TinyUSB itself only operates on the USB peripheral. The board directory also includes information what files are needed to build the example.
|
||||
|
||||
One of the first things to change is the `-DCFG_TUSB_MCU` cflag in the `board.mk` file. This is used to tell TinyUSB what platform is being built. So, add an entry to `src/tusb_option.h` and update the CFLAG to match.
|
||||
One of the first things to change is the ``-DCFG_TUSB_MCU`` cflag in the ``board.mk`` file. This is used to tell TinyUSB what platform is being built. So, add an entry to ``src/tusb_option.h`` and update the CFLAG to match.
|
||||
|
||||
Update `board.mk`'s VENDOR and CHIP_FAMILY values when creating the directory for the struct files. Duplicate one of the other sources from `src/portable` into `src/portable/<vendor>/<chip_family>` and delete all of the implementation internals. We'll cover what everything there does later. For now, get it compiling.
|
||||
Update ``board.mk``\ 's VENDOR and CHIP_FAMILY values when creating the directory for the struct files. Duplicate one of the other sources from ``src/portable`` into ``src/portable/<vendor>/<chip_family>`` and delete all of the implementation internals. We'll cover what everything there does later. For now, get it compiling.
|
||||
|
||||
## Implementation
|
||||
At this point you should get an error due to an implementation issue and hopefully the build is setup for the new MCU. You will still need to modify the `board.mk` to include specific CFLAGS, the linker script, linker flags, source files, include directories. All file paths are relative to the top of the TinyUSB repo.
|
||||
Implementation
|
||||
--------------
|
||||
|
||||
At this point you should get an error due to an implementation issue and hopefully the build is setup for the new MCU. You will still need to modify the ``board.mk`` to include specific CFLAGS, the linker script, linker flags, source files, include directories. All file paths are relative to the top of the TinyUSB repo.
|
||||
|
||||
Board Support (BSP)
|
||||
^^^^^^^^^^^^^^^^^^^
|
||||
|
||||
### Board Support (BSP)
|
||||
The board support code is only used for self-contained examples and testing. It is not used when TinyUSB is part of a larger project. Its responsible for getting the MCU started and the USB peripheral clocked. It also optionally provides LED definitions that are used to blink an LED to show that the code is running.
|
||||
|
||||
It is located in `hw/bsp/<board name>/board_<board name>.c`.
|
||||
It is located in ``hw/bsp/<board name>/board_<board name>.c``.
|
||||
|
||||
#### board_init
|
||||
`board_init` is responsible for starting the MCU, setting up the USB clock and USB pins. It is also responsible for initializing LED pins.
|
||||
board_init
|
||||
~~~~~~~~~~
|
||||
|
||||
``board_init`` is responsible for starting the MCU, setting up the USB clock and USB pins. It is also responsible for initializing LED pins.
|
||||
|
||||
One useful clock debugging technique is to set up a PWM output at a known value such as 500hz based on the USB clock so that you can verify it is correct with a logic probe or oscilloscope.
|
||||
|
||||
Setup your USB in a crystal-less mode when available. That makes the code easier to port across boards.
|
||||
|
||||
#### board_led_write
|
||||
Feel free to skip this until you want to verify your demo code is running. To implement, set the pin corresponding to the led to output a value that lights the LED when `state` is true.
|
||||
board_led_write
|
||||
~~~~~~~~~~~~~~~
|
||||
|
||||
### OS Abstraction Layer (OSAL)
|
||||
Feel free to skip this until you want to verify your demo code is running. To implement, set the pin corresponding to the led to output a value that lights the LED when ``state`` is true.
|
||||
|
||||
The OS Abstraction Layer is responsible for providing basic data structures for TinyUSB that may allow for concurrency when used with an RTOS. Without an RTOS it simply handles concurrency issues between the main code and interrupts.
|
||||
OS Abstraction Layer (OSAL)
|
||||
^^^^^^^^^^^^^^^^^^^^^^^^^^^
|
||||
|
||||
The code is almost entirely agnostic of MCU and lives in `src/osal`.
|
||||
The OS Abstraction Layer is responsible for providing basic data structures for TinyUSB that may allow for concurrency when used with an RTOS. Without an RTOS it simply handles concurrency issues between the main code and interrupts. The code is almost entirely agnostic of MCU and lives in ``src/osal``.
|
||||
|
||||
### Device API
|
||||
In RTOS configurations, tud_task()/tuh_task() blocks behind a synchronization structure when the event queue is empty, so that the scheduler may give the CPU to a different task. To take advantage of the library's capability to yield the CPU when there are no actionable USB device events, ensure that the `CFG_TUSB_OS` symbol is defined, e.g `OPT_OS_FREERTOS` enables the FreeRTOS scheduler to schedule other threads than that which calls `tud_task()/tuh_task()`.
|
||||
|
||||
After the USB device is setup, the USB device code works by processing events on the main thread (by calling `tud_task`). These events are queued by the USB interrupt handler. So, there are three parts to the device low-level API: device setup, endpoint setup and interrupt processing.
|
||||
Device API
|
||||
^^^^^^^^^^
|
||||
|
||||
All of the code for the low-level device API is in `src/portable/<vendor>/<chip family>/dcd_<chip family>.c`.
|
||||
After the USB device is setup, the USB device code works by processing events on the main thread (by calling ``tud_task``\ ). These events are queued by the USB interrupt handler. So, there are three parts to the device low-level API: device setup, endpoint setup and interrupt processing.
|
||||
|
||||
#### Device Setup
|
||||
All of the code for the low-level device API is in ``src/portable/<vendor>/<chip family>/dcd_<chip family>.c``.
|
||||
|
||||
##### dcd_init
|
||||
Device Setup
|
||||
~~~~~~~~~~~~
|
||||
|
||||
dcd_init
|
||||
""""""""
|
||||
|
||||
Initializes the USB peripheral for device mode and enables it.
|
||||
This function should enable internal D+/D- pull-up for enumeration.
|
||||
|
||||
##### dcd_int_enable / dcd_int_disable
|
||||
dcd_int_enable / dcd_int_disable
|
||||
""""""""""""""""""""""""""""""""
|
||||
|
||||
Enables or disables the USB device interrupt(s). May be used to prevent concurrency issues when mutating data structures shared between main code and the interrupt handler.
|
||||
|
||||
##### dcd_int_handler
|
||||
dcd_int_handler
|
||||
"""""""""""""""
|
||||
|
||||
Processes all the hardware generated events e.g Bus reset, new data packet from host etc ... It will be called by application in the MCU USB interrupt handler.
|
||||
|
||||
##### dcd_set_address
|
||||
dcd_set_address
|
||||
"""""""""""""""
|
||||
|
||||
Called when the device is given a new bus address.
|
||||
|
||||
If your peripheral automatically changes address during enumeration (like the nrf52) you may leave this empty and also no queue an event for the corresponding SETUP packet.
|
||||
|
||||
##### dcd_remote_wakeup
|
||||
dcd_remote_wakeup
|
||||
"""""""""""""""""
|
||||
|
||||
Called to remote wake up host when suspended (e.g hid keyboard)
|
||||
|
||||
##### dcd_connect / dcd_disconnect
|
||||
dcd_connect / dcd_disconnect
|
||||
""""""""""""""""""""""""""""
|
||||
|
||||
Connect or disconnect the data-line pull-up resistor. Define only if MCU has an internal pull-up. (BSP may define for MCU without internal pull-up.)
|
||||
|
||||
#### Special events
|
||||
Special events
|
||||
~~~~~~~~~~~~~~
|
||||
|
||||
You must let TinyUSB know when certain events occur so that it can continue its work. There are a few methods you can call to queue events for TinyUSB to process.
|
||||
|
||||
##### dcd_event_bus_signal
|
||||
dcd_event_bus_signal
|
||||
""""""""""""""""""""
|
||||
|
||||
There are a number of events that your peripheral may communicate about the state of the bus. Here is an overview of what they are. Events in **BOLD** must be provided for TinyUSB to work.
|
||||
|
||||
|
||||
* **DCD_EVENT_RESET** - Triggered when the host resets the bus causing the peripheral to reset. Do any other internal reset you need from the interrupt handler such as resetting the control endpoint.
|
||||
* DCD_EVENT_SOF - Signals the start of a new USB frame.
|
||||
|
||||
Calls to this look like:
|
||||
|
||||
dcd_event_bus_signal(0, DCD_EVENT_BUS_RESET, true);
|
||||
.. code-block::
|
||||
|
||||
The first `0` is the USB peripheral number. Statically saying 0 is common for single USB device MCUs.
|
||||
dcd_event_bus_signal(0, DCD_EVENT_BUS_RESET, true);
|
||||
|
||||
The `true` indicates the call is from an interrupt handler and will always be the case when porting in this way.
|
||||
|
||||
##### dcd_setup_received
|
||||
The first ``0`` is the USB peripheral number. Statically saying 0 is common for single USB device MCUs.
|
||||
|
||||
SETUP packets are a special type of transaction that can occur at any time on the control endpoint, numbered `0`. Since they are unique, most peripherals have special handling for them. Their data is always 8 bytes in length as well.
|
||||
The ``true`` indicates the call is from an interrupt handler and will always be the case when porting in this way.
|
||||
|
||||
dcd_setup_received
|
||||
""""""""""""""""""
|
||||
|
||||
SETUP packets are a special type of transaction that can occur at any time on the control endpoint, numbered ``0``. Since they are unique, most peripherals have special handling for them. Their data is always 8 bytes in length as well.
|
||||
|
||||
Calls to this look like:
|
||||
|
||||
dcd_event_setup_received(0, setup, true);
|
||||
.. code-block::
|
||||
|
||||
As before with `dcd_event_bus_signal` the first argument is the USB peripheral number and the third is true to signal its being called from an interrupt handler. The middle argument is byte array of length 8 with the contents of the SETUP packet. It can be stack allocated because it is copied into the queue.
|
||||
dcd_event_setup_received(0, setup, true);
|
||||
|
||||
#### Endpoints
|
||||
|
||||
As before with ``dcd_event_bus_signal`` the first argument is the USB peripheral number and the third is true to signal its being called from an interrupt handler. The middle argument is byte array of length 8 with the contents of the SETUP packet. It can be stack allocated because it is copied into the queue.
|
||||
|
||||
Endpoints
|
||||
~~~~~~~~~
|
||||
|
||||
Endpoints are the core of the USB data transfer process. They come in a few forms such as control, isochronous, bulk, and interrupt. We won't cover the details here except with some caveats in open below. In general, data is transferred by setting up a buffer of a given length to be transferred on a given endpoint address and then waiting for an interrupt to signal that the transfer is finished. Further details below.
|
||||
|
||||
Endpoints within USB have an address which encodes both the number and direction of an endpoint. TinyUSB provides `tu_edpt_number` and `tu_edpt_dir` to unpack this data from the address. Here is a snippet that does it.
|
||||
Endpoints within USB have an address which encodes both the number and direction of an endpoint. TinyUSB provides ``tu_edpt_number`` and ``tu_edpt_dir`` to unpack this data from the address. Here is a snippet that does it.
|
||||
|
||||
uint8_t epnum = tu_edpt_number(ep_addr);
|
||||
uint8_t dir = tu_edpt_dir(ep_addr);
|
||||
.. code-block::
|
||||
|
||||
##### dcd_edpt_open
|
||||
uint8_t epnum = tu_edpt_number(ep_addr);
|
||||
uint8_t dir = tu_edpt_dir(ep_addr);
|
||||
|
||||
|
||||
dcd_edpt_open
|
||||
"""""""""""""
|
||||
|
||||
Opening an endpoint is done for all non-control endpoints once the host picks a configuration that the device should use. At this point, the endpoint should be enabled in the peripheral and configured to match the endpoint descriptor. Pay special attention to the direction of the endpoint you can get from the helper methods above. It will likely change what registers you are setting.
|
||||
|
||||
Also make sure to enable endpoint specific interrupts.
|
||||
|
||||
##### dcd_edpt_close
|
||||
dcd_edpt_close
|
||||
""""""""""""""
|
||||
|
||||
Close an endpoint. his function is used for implementing alternate settings.
|
||||
|
||||
@ -138,16 +177,17 @@ After calling this, the device should not respond to any packets directed toward
|
||||
|
||||
Implementation is optional. Must be called from the USB task. Interrupts could be disabled or enabled during the call.
|
||||
|
||||
##### dcd_edpt_xfer
|
||||
dcd_edpt_xfer
|
||||
"""""""""""""
|
||||
|
||||
`dcd_edpt_xfer` is responsible for configuring the peripheral to send or receive data from the host. "xfer" is short for "transfer". **This is one of the core methods you must implement for TinyUSB to work (one other is the interrupt handler).** Data from the host is the OUT direction and data to the host is IN. It is used for all endpoints including the control endpoint 0. Make sure to handle the zero-length packet STATUS packet on endpoint 0 correctly. It may be a special transaction to the peripheral.
|
||||
``dcd_edpt_xfer`` is responsible for configuring the peripheral to send or receive data from the host. "xfer" is short for "transfer". **This is one of the core methods you must implement for TinyUSB to work (one other is the interrupt handler).** Data from the host is the OUT direction and data to the host is IN. It is used for all endpoints including the control endpoint 0. Make sure to handle the zero-length packet STATUS packet on endpoint 0 correctly. It may be a special transaction to the peripheral.
|
||||
|
||||
Besides that, all other transactions are relatively straight-forward. The endpoint address provides the endpoint
|
||||
number and direction which usually determines where to write the buffer info. The buffer and its length are usually
|
||||
written to a specific location in memory and the peripheral is told the data is valid. (Maybe by writing a 1 to a
|
||||
register or setting a counter register to 0 for OUT or length for IN.)
|
||||
|
||||
The transmit buffer alignment is determined by `CFG_TUSB_MEM_ALIGN`.
|
||||
The transmit buffer alignment is determined by ``CFG_TUSB_MEM_ALIGN``.
|
||||
|
||||
One potential pitfall is that the buffer may be longer than the maximum endpoint size of one USB
|
||||
packet. Some peripherals can handle transmitting multiple USB packets for a provided buffer (like the SAMD21).
|
||||
@ -155,37 +195,47 @@ Others (like the nRF52) may need each USB packet queued individually. To make th
|
||||
some state for yourself and queue up an intermediate USB packet from the interrupt handler.
|
||||
|
||||
Once the transaction is going, the interrupt handler will notify TinyUSB of transfer completion.
|
||||
During transmission, the IN data buffer is guarenteed to remain unchanged in memory until the `dcd_xfer_complete` function is called.
|
||||
During transmission, the IN data buffer is guaranteed to remain unchanged in memory until the ``dcd_xfer_complete`` function is called.
|
||||
|
||||
The dcd_edpt_xfer function must never add zero-length-packets (ZLP) on its own to a transfer. If a ZLP is required,
|
||||
then it must be explicitly sent by the stack calling dcd_edpt_xfer(), by calling dcd_edpt_xfer() a second time with len=0.
|
||||
For control transfers, this is automatically done in `usbd_control.c`.
|
||||
For control transfers, this is automatically done in ``usbd_control.c``.
|
||||
|
||||
At the moment, only a single buffer can be transmitted at once. There is no provision for double-buffering. new dcd_edpt_xfer() will not
|
||||
be called again on the same endpoint address until the driver calls dcd_xfer_complete() (except in cases of USB resets).
|
||||
|
||||
##### dcd_xfer_complete
|
||||
dcd_xfer_complete
|
||||
"""""""""""""""""
|
||||
|
||||
Once a transfer completes you must call dcd_xfer_complete from the USB interrupt handler to let TinyUSB know that a transaction has completed. Here is a sample call:
|
||||
|
||||
dcd_event_xfer_complete(0, ep_addr, xfer->actual_len, XFER_RESULT_SUCCESS, true);
|
||||
.. code-block::
|
||||
|
||||
dcd_event_xfer_complete(0, ep_addr, xfer->actual_len, XFER_RESULT_SUCCESS, true);
|
||||
|
||||
|
||||
The arguments are:
|
||||
|
||||
|
||||
* the USB peripheral number
|
||||
* the endpoint address
|
||||
* the actual length of the transfer. (OUT transfers may be smaller than the buffer given in `dcd_edpt_xfer`)
|
||||
* the actual length of the transfer. (OUT transfers may be smaller than the buffer given in ``dcd_edpt_xfer``\ )
|
||||
* the result of the transfer. Failure isn't handled yet.
|
||||
* `true` to note the call is from an interrupt handler.
|
||||
* ``true`` to note the call is from an interrupt handler.
|
||||
|
||||
##### dcd_edpt_stall / dcd_edpt_clear_stall
|
||||
dcd_edpt_stall / dcd_edpt_clear_stall
|
||||
"""""""""""""""""""""""""""""""""""""
|
||||
|
||||
Stalling is one way an endpoint can indicate failure such as when an unsupported command is transmitted. The pair of `dcd_edpt_stall`, `dcd_edpt_clear_stall` help manage the stall state of all endpoints.
|
||||
Stalling is one way an endpoint can indicate failure such as when an unsupported command is transmitted. The pair of ``dcd_edpt_stall``\ , ``dcd_edpt_clear_stall`` help manage the stall state of all endpoints.
|
||||
|
||||
## Woohoo!
|
||||
Woohoo!
|
||||
-------
|
||||
|
||||
At this point you should have everything working! ;-) Of course, you may not write perfect code. Here are some tips and tricks for debugging.
|
||||
|
||||
Use [WireShark](https://www.wireshark.org/) or [a Beagle](https://www.totalphase.com/protocols/usb/) to sniff the USB traffic. When things aren't working its likely very early in the USB enumeration process. Figuring out where can help clue in where the issue is. For example:
|
||||
Use `WireShark <https://www.wireshark.org/>`_ or `a Beagle <https://www.totalphase.com/protocols/usb/>`_ to sniff the USB traffic. When things aren't working its likely very early in the USB enumeration process. Figuring out where can help clue in where the issue is. For example:
|
||||
|
||||
|
||||
* If the host sends a SETUP packet and its not ACKed then your USB peripheral probably isn't started correctly.
|
||||
* If the peripheral is started correctly but it still didn't work, then verify your usb clock is correct. (You did output a PWM based on it right? ;-) )
|
||||
* If the SETUP packet is ACKed but nothing is sent back then you interrupt handler isn't queueing the setup packet correctly. (Also, if you are using your own code instead of an example `tud_task` may not be called.) If thats OK, the `dcd_xfer_complete` may not be setting up the next transaction correctly.
|
||||
* If the SETUP packet is ACKed but nothing is sent back then you interrupt handler isn't queueing the setup packet correctly. (Also, if you are using your own code instead of an example ``tud_task`` may not be called.) If that's OK, the ``dcd_xfer_complete`` may not be setting up the next transaction correctly.
|
||||
59
docs/contributing/structure.rst
Normal file
59
docs/contributing/structure.rst
Normal file
@ -0,0 +1,59 @@
|
||||
*********
|
||||
Structure
|
||||
*********
|
||||
|
||||
Tree
|
||||
====
|
||||
|
||||
::
|
||||
|
||||
.
|
||||
├── docs
|
||||
├── examples
|
||||
├── hw
|
||||
│ ├── bsp
|
||||
│ └── mcu
|
||||
├── lib
|
||||
├── src
|
||||
├── test
|
||||
└── tools
|
||||
|
||||
docs
|
||||
----
|
||||
|
||||
Documentation
|
||||
|
||||
examples
|
||||
--------
|
||||
|
||||
Sample with Makefile build support
|
||||
|
||||
hw/bsp
|
||||
------
|
||||
|
||||
Supported boards source files
|
||||
|
||||
hw/mcu
|
||||
------
|
||||
|
||||
Low level mcu core & peripheral drivers
|
||||
|
||||
lib
|
||||
---
|
||||
|
||||
Sources from 3rd party such as freeRTOS, fatfs ...
|
||||
|
||||
src
|
||||
---
|
||||
|
||||
All sources files for TinyUSB stack itself.
|
||||
|
||||
test
|
||||
----
|
||||
|
||||
Unit tests for the stack
|
||||
|
||||
tools
|
||||
-----
|
||||
|
||||
Files used internally
|
||||
@ -1,137 +0,0 @@
|
||||
# Getting Started #
|
||||
|
||||
## Add TinyUSB to your project
|
||||
|
||||
It is relatively simple to incorporate tinyusb to your (existing) project
|
||||
|
||||
- Copy or `git submodule` this repo into your project in a subfolder. Let's say it is *your_project/tinyusb*
|
||||
- Add all the .c in the `tinyusb/src` folder to your project
|
||||
- Add *your_project/tinyusb/src* to your include path. Also make sure your current include path also contains the configuration file tusb_config.h.
|
||||
- Make sure all required macros are all defined properly in tusb_config.h (configure file in demo application is sufficient, but you need to add a few more such as CFG_TUSB_MCU, CFG_TUSB_OS since they are passed by IDE/compiler to maintain a unique configure for all boards).
|
||||
- If you use the device stack, make sure you have created/modified usb descriptors for your own need. Ultimately you need to implement all **tud_descriptor_** callbacks for the stack to work.
|
||||
- Add tusb_init() call to your reset initialization code.
|
||||
- Call `tud_int_handler()` (device) and/or `tuh_int_handler()` (host) in your USB IRQ Handler
|
||||
- Implement all enabled classes's callbacks.
|
||||
- If you don't use any RTOSes at all, you need to continuously and/or periodically call tud_task()/tuh_task() function. All of the callbacks and functionality are handled and invoked within the call of that task runner.
|
||||
|
||||
~~~{.c}
|
||||
int main(void)
|
||||
{
|
||||
your_init_code();
|
||||
tusb_init(); // initialize tinyusb stack
|
||||
|
||||
while(1) // the mainloop
|
||||
{
|
||||
your_application_code();
|
||||
|
||||
tud_task(); // device task
|
||||
tuh_task(); // host task
|
||||
}
|
||||
}
|
||||
~~~
|
||||
|
||||
## Examples
|
||||
|
||||
For your convenience, TinyUSB contains a handful of examples for both host and device with/without RTOS to quickly test the functionality as well as demonstrate how API() should be used. Most examples will work on most of [the supported Boards](boards.md). Firstly we need to `git clone` if not already
|
||||
|
||||
```
|
||||
$ git clone https://github.com/hathach/tinyusb tinyusb
|
||||
$ cd tinyusb
|
||||
```
|
||||
|
||||
Some TinyUSB examples also requires external submodule libraries in `/lib` such as FreeRTOS, Lightweight IP to build. Run following command to fetch them
|
||||
|
||||
```
|
||||
$ git submodule update --init lib
|
||||
```
|
||||
|
||||
In addition, MCU driver submodule is also needed to provide low-level MCU peripheral's driver. Luckily, it will be fetched if needed when you run the `make` to build your board.
|
||||
|
||||
Note: some examples especially those that uses Vendor class (e.g webUSB) may requires udev permission on Linux (and/or macOS) to access usb device. It depends on your OS distro, typically copy `/examples/device/99-tinyusb.rules` file to /etc/udev/rules.d/ then run `sudo udevadm control --reload-rules && sudo udevadm trigger` is good enough.
|
||||
|
||||
### Build
|
||||
|
||||
To build example, first change directory to an example folder.
|
||||
|
||||
```
|
||||
$ cd examples/device/cdc_msc
|
||||
```
|
||||
|
||||
Then compile with `make BOARD=[board_name] all`, for example
|
||||
|
||||
```
|
||||
$ make BOARD=feather_nrf52840_express all
|
||||
```
|
||||
|
||||
Note: `BOARD` can be found as directory name in `hw/bsp`, either in its family/boards or directly under bsp (no family).
|
||||
|
||||
#### Port Selection
|
||||
|
||||
If a board has several ports, one port is chosen by default in the individual board.mk file. Use option `PORT=x` To choose another port. For example to select the HS port of a STM32F746Disco board, use:
|
||||
|
||||
```
|
||||
$ make BOARD=stm32f746disco PORT=1 all
|
||||
```
|
||||
|
||||
#### Port Speed
|
||||
|
||||
A MCU can support multiple operational speed. By default, the example build system will use the fastest supported on the board. Use option `SPEED=full/high` e.g To force F723 operate at full instead of default high speed
|
||||
|
||||
```
|
||||
$ make BOARD=stm32f746disco SPEED=full all
|
||||
```
|
||||
|
||||
### Debug
|
||||
|
||||
To compile for debugging add `DEBUG=1`, for example
|
||||
|
||||
```
|
||||
$ make BOARD=feather_nrf52840_express DEBUG=1 all
|
||||
```
|
||||
|
||||
#### Log
|
||||
|
||||
Should you have an issue running example and/or submitting an bug report. You could enable TinyUSB built-in debug logging with optional `LOG=`. LOG=1 will only print out error message, LOG=2 print more information with on-going events. LOG=3 or higher is not used yet.
|
||||
|
||||
```
|
||||
$ make BOARD=feather_nrf52840_express LOG=2 all
|
||||
```
|
||||
|
||||
#### Logger
|
||||
|
||||
By default log message is printed via on-board UART which is slow and take lots of CPU time comparing to USB speed. If your board support on-board/external debugger, it would be more efficient to use it for logging. There are 2 protocols:
|
||||
|
||||
- `LOGGER=rtt`: use [Segger RTT protocol](https://www.segger.com/products/debug-probes/j-link/technology/about-real-time-transfer/)
|
||||
- Cons: requires jlink as the debugger.
|
||||
- Pros: work with most if not all MCUs
|
||||
- Software viewer is JLink RTT Viewer/Client/Logger which is bundled with JLink driver package.
|
||||
- `LOGGER=swo`: Use dedicated SWO pin of ARM Cortex SWD debug header.
|
||||
- Cons: only work with ARM Cortex MCUs minus M0
|
||||
- Pros: should be compatible with more debugger that support SWO.
|
||||
- Software viewer should be provided along with your debugger driver.
|
||||
|
||||
```
|
||||
$ make BOARD=feather_nrf52840_express LOG=2 LOGGER=rtt all
|
||||
$ make BOARD=feather_nrf52840_express LOG=2 LOGGER=swo all
|
||||
```
|
||||
|
||||
### Flash
|
||||
|
||||
`flash` target will use the default on-board debugger (jlink/cmsisdap/stlink/dfu) to flash the binary, please install those support software in advance. Some board use bootloader/DFU via serial which is required to pass to make command
|
||||
|
||||
```
|
||||
$ make BOARD=feather_nrf52840_express flash
|
||||
$ make SERIAL=/dev/ttyACM0 BOARD=feather_nrf52840_express flash
|
||||
```
|
||||
|
||||
Since jlink can be used with most of the boards, there is also `flash-jlink` target for your convenience.
|
||||
|
||||
```
|
||||
$ make BOARD=feather_nrf52840_express flash-jlink
|
||||
```
|
||||
|
||||
Some board use uf2 bootloader for drag & drop in to mass storage device, uf2 can be generated with `uf2` target
|
||||
|
||||
```
|
||||
$ make BOARD=feather_nrf52840_express all uf2
|
||||
```
|
||||
25
docs/index.rst
Normal file
25
docs/index.rst
Normal file
@ -0,0 +1,25 @@
|
||||
:hide-toc:
|
||||
|
||||
*********
|
||||
TinyUSB
|
||||
*********
|
||||
|
||||
TinyUSB is an open-source cross-platform USB Host/Device stack for embedded systems,
|
||||
designed to be memory-safe with no dynamic allocation and thread-safe with all interrupt events being deferred and then handled in the non-ISR task function.
|
||||
|
||||
|
||||
.. toctree::
|
||||
:caption: Index
|
||||
:hidden:
|
||||
|
||||
Info <info/index>
|
||||
Reference <reference/index>
|
||||
Contributing <contributing/index>
|
||||
|
||||
.. toctree::
|
||||
:caption: External Links
|
||||
:hidden:
|
||||
|
||||
Source Code <https://github.com/hathach/tinyusb>
|
||||
Issue Tracker <https://github.com/hathach/tinyusb/issues>
|
||||
Discussions <https://github.com/hathach/tinyusb/discussions>
|
||||
940
docs/info/changelog.rst
Normal file
940
docs/info/changelog.rst
Normal file
@ -0,0 +1,940 @@
|
||||
*********
|
||||
Changelog
|
||||
*********
|
||||
|
||||
0.16.0
|
||||
======
|
||||
|
||||
- New controller driver: MAX3421e (usb host shield), rusb2 (Renesas USB2.0), ChipIdea fullspeed
|
||||
- New MCUs: MCXn9, nRF5340, STM32: G0, G4, L5, U575, U5A5, RA6m5, CH32F20x
|
||||
- Add initial TypeC PowerDelivery support with STM32G4
|
||||
- Remove submodules and use python script to manage repo dependencies #1947
|
||||
- Add CMake support for most families and boards, move build file from tools/ to examples/build_system
|
||||
- Add ETM trace support with JTrace for nrf52840, nrf5340, mcb1857, stm32h743eval, ra6m5
|
||||
- [osal] Make it possible to override the osal_task_delay() in osal_none
|
||||
- Add CDC+UAC2 composite device example
|
||||
- Enhance Hardware-in-the-loop (HIL) testing with more boards: rp2040, stm32l412nucleo, stm32f746disco, lpcxpresso43s67
|
||||
|
||||
Controller Driver (DCD & HCD)
|
||||
-----------------------------
|
||||
|
||||
- Add new ISO endpoint API: dcd_edpt_iso_alloc() and dcd_edpt_iso_activate()
|
||||
- Remove legacy driver st/synopsys
|
||||
|
||||
- EHCI
|
||||
|
||||
- [iMXRT] Add dache clean/invalidate when memory is in cacheable memory
|
||||
- Fix portsc write issue which cause problem with enumeration
|
||||
- Fix an issue when doing port reset write to portsc
|
||||
- Fix port change detect is not recognized when power on with attached device
|
||||
- Fix xfer failed with disconnected device as stalled
|
||||
- Fix error on EHCI causes xfer error in non-queued qhd which cause memory fault
|
||||
- Un-roll recursive hub removal with usbh queue
|
||||
- Fix issue when removing queue head
|
||||
- Implement hcd_edpt_abort_xfer()
|
||||
- use standard USB complete interrupt instead of custom chipidea async/period interrupt to be more compatible with other ehci implementation
|
||||
- refactor usb complete & error isr processing, merge, update. Fix EHCI QHD reuses QTD on wrong endpoint
|
||||
- Improve bus reset, fix send_setup() not carried out if halted previously
|
||||
- Fix clear qhd halted bit if not caused by STALL protocol to allow for next transfer
|
||||
|
||||
- ChipIdea Highspeed
|
||||
|
||||
- Fix control transfer issue when previous status and new setup complete in the same isr frame
|
||||
- [imxrt] Add dcache support for cache region
|
||||
|
||||
- ChipIdea Fullspeed
|
||||
|
||||
- Generalize ChipIdea Fullspeed driver for mcxn9 (port 0), kinetis
|
||||
|
||||
- nrf
|
||||
|
||||
- Fix DMA race condition with ISO OUT transfer #1946
|
||||
- Add support for nRF5340 with pca10095 board
|
||||
|
||||
- Renesas rusb2
|
||||
|
||||
- Generalize rusb2 driver for ra, rx mcus
|
||||
- rework both dcd and hcd for better multiple ports support
|
||||
- Add support for board with HS USB port: ra6m5 port1
|
||||
|
||||
- rp2040
|
||||
|
||||
- [dcd] Make writes to SIE_CTRL aware of concurrent access
|
||||
- [hcd] add hcd_frame_number(), hcd_edpt_abort_xfer() for pio-usb host
|
||||
|
||||
- stm32 fsdev:
|
||||
|
||||
- Add STM32L5 support
|
||||
- Implement dcd_edpt_iso_alloc() and dcd_edpt_iso_activate()
|
||||
|
||||
- OHCI
|
||||
|
||||
- Allows configurable root hub ports, handles SMM mode (Ref OHCI spec 5.1.1.3.3) and Bios mode (Ref OHCI spec 5.1.1.3.4)
|
||||
- Fix FrameIntervalToggle must be toggled after we write the FrameInterval (Ref OHCI Spec 7.3.1)
|
||||
- Wait PowerOnToPowerGoodTime after we enable power of the RH ports (Ref OHCI Spec 7.4.1)
|
||||
- Generate port interrupts for devices already connected during init.
|
||||
- Fix issue when removing queue head
|
||||
- Disable MIE during IRQ processing and clear HccaDoneHead on completion as per OCHI Spec Page 80
|
||||
|
||||
Device Stack
|
||||
------------
|
||||
|
||||
- Add optional hooks tud_event_hook_cb()
|
||||
- Audio (UAC2)
|
||||
|
||||
- Fix feedback EP buffer alignment.
|
||||
- Fix encoding, update example
|
||||
- Improve IN transfer
|
||||
|
||||
- Bluetooth
|
||||
|
||||
- Add historical EP compatibility for Bluetooth HCI
|
||||
|
||||
- CDC
|
||||
|
||||
- Fix line_coding alignment
|
||||
- Fix typo in cdc line coding enum
|
||||
|
||||
- MIDI
|
||||
|
||||
- Fix stream_write() always writes system messages to cable 0
|
||||
- Fix incorrect NOTE_ON, NOTE_OFF definitions
|
||||
|
||||
- USBTMC: Fix tmc488 bit order
|
||||
|
||||
- Vendor: fix read()/write() race condition
|
||||
|
||||
- Video (UVC)
|
||||
|
||||
- Add the capability for video class to handle a bulk endpoint in the streaming interface.
|
||||
|
||||
Host Stack
|
||||
----------
|
||||
|
||||
- USBH
|
||||
|
||||
- Add new APIs: tuh_interface_set(), tuh_task_event_ready(), tuh_edpt_abort_xfer(), tuh_rhport_reset_bus(), tuh_rhport_is_active()
|
||||
- Fix issue when device generate multiple attach/detach/attach when plugging in
|
||||
- Prefer application callback over built-in driver on transfer complete event
|
||||
- Correct hcd_edpt_clear_stall() API signature
|
||||
- Separate bus reset delay and contact debouncing delay in enumeration
|
||||
- Support usbh_app_driver_get_cb() for application drivers
|
||||
- Fix usbh enumeration removal race condition
|
||||
- Add optional hooks tuh_event_hook_cb()
|
||||
|
||||
- CDC
|
||||
|
||||
- Breaking: change tuh_cdc_itf_get_info() to use tuh_itf_info_t instead of tuh_cdc_info_t
|
||||
- Fix cdc host enumeration issue when device does not support line request
|
||||
- Add support for vendor usb2uart serial: ftdi, cp210x, ch9102f
|
||||
- Improve sync control API e.g tuh_cdc_set_control_line_state(), tuh_cdc_set_line_coding()
|
||||
|
||||
- HID
|
||||
|
||||
- Add new APIs tuh_hid_send_report(), tuh_hid_itf_get_info(), tuh_hid_receive_ready(), tuh_hid_send_ready(), tuh_hid_set_default_protocol()
|
||||
- Change meaning of CFG_TUH_HID to total number of HID interfaces supported. Previously CFG_TUH_HID is max number of interfaces per device which is rather limited and consume more resources than needed.
|
||||
|
||||
- HUB
|
||||
|
||||
- Fix handling of empty "status change" interrupt
|
||||
- Fix issue with hub status_change is not aligned
|
||||
|
||||
- MSC
|
||||
|
||||
- Fix bug in tuh_msc_ready()
|
||||
- Fix host msc get maxlun not using aligned section memory
|
||||
|
||||
0.15.0
|
||||
======
|
||||
|
||||
- Add codespell to detect typo
|
||||
- Add support for fuzzing and bagde for oss-fuzz
|
||||
- [osal]
|
||||
|
||||
- Allow the use of non-static allocation for FreeRTOS
|
||||
- Fix FreeRTOS wrong task switch in some cases
|
||||
|
||||
- Fix tu_fifo memory overflown when repeatedly write to overwritable fifo (accumulated more than 2 depths)
|
||||
- Better support for IAR (ARM) with ci build check for stm32 mcus.
|
||||
- Fix Windows build for some mingw gnu make situations
|
||||
|
||||
Controller Driver (DCD & HCD)
|
||||
-----------------------------
|
||||
|
||||
- Add new port support (WIP) for WCH CH32V307 USB Highspeed
|
||||
- Add new port support (WIP) for PIC32MM/MX & PIC24
|
||||
|
||||
- [nRF]
|
||||
|
||||
- Fix endpoint internal state when closed
|
||||
- Fix reception of large ISO packets
|
||||
|
||||
- [rp2040]
|
||||
|
||||
- [dcd] Implement workaround for Errata 15. This enable SOF when bulk-in endpoint is in use and reduce its bandwidth to only 80%
|
||||
- [hcd] Fix shared irq slots filling up when hcd_init() is called multiple times
|
||||
- [hcd] Support host bulk endpoint using hw "interrupt" endpoint. Note speed limit is 64KB/s
|
||||
|
||||
- [samd][dcd] Add support for ISO endpoint
|
||||
- [dwc2][dcd] Add support for stm32u5xx
|
||||
- [esp32sx] Fix Isochronous transfers only transmitted on even frame
|
||||
- [lpc_ip3511][dcd] Add isochronous support and fix endpoint accidental write
|
||||
- [ft90x] Improve and enhance support for FT9xx MCU, tested with more examples
|
||||
|
||||
Device Stack
|
||||
------------
|
||||
|
||||
- [Video]
|
||||
|
||||
- Add support for MJPEG
|
||||
- Fix probe on macOS
|
||||
|
||||
- [MIDI]
|
||||
|
||||
- Support port name strings
|
||||
- fix MS Header wTotalLength computation
|
||||
|
||||
- [HID]
|
||||
|
||||
- Add FIDO descriptor template
|
||||
- change length in tud_hid_report_complete_cb() from uint8 to uint16
|
||||
|
||||
- [CDC]
|
||||
|
||||
- Fix autoflush for FIFO < MPS
|
||||
- Fix tx fifo memory overflown when DTR is not set and tud_cdc_write() is called repeatedly with large enough data
|
||||
|
||||
- [USBTMC] Fix packet size with highspeed
|
||||
|
||||
Host Stack
|
||||
----------
|
||||
|
||||
- Retry a few times with transfers in enumeration since device can be unstable when starting up
|
||||
- [MSC] Rework host masstorage API. Add new **host/msc_file_explorer** example
|
||||
- [CDC]
|
||||
|
||||
- Add support for host cdc
|
||||
- Fix host cdc with device without IAD e.g Arduino Due
|
||||
|
||||
0.14.0
|
||||
======
|
||||
|
||||
- Improve compiler support for CCRX and IAR
|
||||
- Add timeout to osal_queue_receive()
|
||||
- Add tud_task_ext(timeout, in_isr) as generic version of tud_task(). Same as tuh_task_ext(), tuh_task()
|
||||
- Enable more warnings -Wnull-dereference -Wuninitialized -Wunused -Wredundant-decls -Wconversion
|
||||
- Add new examples
|
||||
|
||||
- host/bare_api to demonstrate generic (app-level) enumeration and endpoint transfer
|
||||
- dual/host_hid_to_device_cdc to run both device and host stack concurrently, get HID report from host and print out to device CDC. This example only work with multiple-controller MCUs and rp2040 with the help of pio-usb as added controller.
|
||||
|
||||
Controller Driver (DCD & HCD)
|
||||
-----------------------------
|
||||
|
||||
- Enhance rhports management to better support dual roles
|
||||
|
||||
- CFG_TUD_ENABLED/CFG_TUH_ENABLED, CFG_TUD_MAX_SPEED/CFG_TUH_MAX_SPEED can be used to replace CFG_TUSB_RHPORT0_MODE/CFG_TUSB_RHPORT1_MODE
|
||||
- tud_init(rphort), tuh_init(rhport) can be used to init stack on specified roothub port (controller) instead of tusb_init(void)
|
||||
- Add dcd/hcd port specific defines `TUP_` (stand for tinyusb port-specific)
|
||||
- [dwc2]
|
||||
|
||||
- Update to support stm32 h72x, h73x with only 1 otg controller
|
||||
- Fix overwrite with grstctl when disable endpoint
|
||||
- [EHCI] Fix an issue with EHCI driver
|
||||
- [msp430] Fix for possible bug in msp430-elf-gcc 9.3.0
|
||||
- [nrf5x] Fix DMA access race condition using atomic function
|
||||
- [pic32] Fix PIC32 santiy
|
||||
- [rp2040]
|
||||
|
||||
- Add PICO-PIO-USB as controller (device/host) support for rp2040
|
||||
- Use shared IRQ handlers, so user can also hook the USB IRQ
|
||||
- Fix resumed signal not reported to device stack
|
||||
- [stm32fsdev] Add support for stm32wb55
|
||||
|
||||
Device Stack
|
||||
------------
|
||||
|
||||
- [Audio] Add support for feedback endpoint computation
|
||||
|
||||
- New API tud_audio_feedback_params_cb(), tud_audio_feedback_interval_isr().
|
||||
- Supported computation method are: frequency with fixed/float or power of 2. Feedback with fifo count is not yet supported.
|
||||
- Fix nitfs (should be 3) in TUD_AUDIO_HEADSET_STEREO_DESCRIPTOR
|
||||
- Fix typo in audiod_rx_done_cb()
|
||||
|
||||
- [DFU] Fix coexistence with other interfaces BTH, RNDIS
|
||||
- [MSC] Fix inquiry response additional length field
|
||||
- [Venndor] Improve write performance
|
||||
|
||||
Host Stack
|
||||
----------
|
||||
|
||||
- Add new API tuh_configure(rhport, cfg_id, cfg_param) for dynamnic port specific behavior configuration
|
||||
- [HID] Open OUT endpoint if available
|
||||
- [Hub] hub clear port and device interrupts
|
||||
- [USBH] Major improvement
|
||||
|
||||
- Rework usbh control transfer with complete callback. New API tuh_control_xfer() though still only carry 1 usbh (no queueing) at a time.
|
||||
- Add generic endpoint transfer with tuh_edpt_open(), tuh_edpt_xfer(). Require `CFG_TUH_API_EDPT_XFER=1`
|
||||
- Support app-level enumeration with new APIs
|
||||
|
||||
- tuh_descriptor_get(), tuh_descriptor_get_device(), tuh_descriptor_get_configuration(), tuh_descriptor_get_hid_report()
|
||||
- tuh_descriptor_get_string(), tuh_descriptor_get_manufacturer_string(), tuh_descriptor_get_product_string(), tuh_descriptor_get_serial_string()
|
||||
- Also add _sync() as sync/blocking version for above APIs
|
||||
|
||||
0.13.0
|
||||
======
|
||||
|
||||
- [tu_fifo] Fix locked mutex when full, and return type in peek_n()
|
||||
|
||||
Controller Driver (DCD & HCD)
|
||||
-----------------------------
|
||||
|
||||
- [DWC2] Generalize synopsys dwc2 with synopsys/dwc2 which support both FS and HS phy (UTMI and ULPI) for various MCUs.
|
||||
- Broadcom 28/27xx on raspberrypi SBC
|
||||
- Silicon Labs EFM32
|
||||
- Espressif ESP32 Sx
|
||||
- GigaDevice GD32
|
||||
- ST STM32
|
||||
- Infineon XMC
|
||||
- [KL25] Add new HCD for NXP KL25
|
||||
- [MUSB] Add new DCD and HCD for Mentor musb with TI MSP432E4
|
||||
- [F1C100s] Add new DCD for Allwinner F1C100s family
|
||||
- [PIC32MZ] Add new DCD for PIC32MZ
|
||||
- [nRF] Fix/Enhance various race condition with: EASY DMA, request HFXO, EPOUT
|
||||
- [ChipIdea] rename Transdimension to more popular ChipIdea Highspeed,
|
||||
- [RP2040] various update/fix for hcd/dcd
|
||||
- [FT9XX] new DCD port for Bridgetek FT90x and FT93x devices
|
||||
- [DA1469X] Fix resume
|
||||
- [OHCI] Fix device array out of bound
|
||||
|
||||
Note: legacy drivers such as st/synopsys, nxp/transdimension are still present in this release but won't receive more update and could be removed in the future.
|
||||
|
||||
Device Stack
|
||||
------------
|
||||
|
||||
- [Audio] Support disabling feedback format correction (16.16 <-> 10.14 format)
|
||||
- [MSC] Add tud_msc_request_sense_cb() callback, change most default sense error to medium not present (0x02, 0x3A, 0x00)
|
||||
- [Video] Fix video_capture example fails enumeration when 8FPS
|
||||
|
||||
Host Stack
|
||||
----------
|
||||
|
||||
No notable changes
|
||||
|
||||
0.12.0
|
||||
======
|
||||
|
||||
- add CFG_TUSB_OS_INC_PATH for os include path
|
||||
|
||||
Device Controller Driver (DCD)
|
||||
------------------------------
|
||||
|
||||
- Getting device stack to pass USB Compliance Verification test (chapter9, HID, MSC). Ports are tested:
|
||||
nRF, SAMD 21/51, rp2040, stm32f4, Renesas RX, iMXRT, ESP32-S2/3, Kinetic KL25/32, DA146xx
|
||||
- Added dcd_edpt_close_all() for switching configuration
|
||||
- [Transdimension] Support dcd_edpt_xfer_fifo() with auto wrap over if fifo buffer is 4K aligned and size is multiple of 4K.
|
||||
- [DA146xx] Improve vbus, reset, suspend, resume detection, and remote wakeup.
|
||||
|
||||
Device Stack
|
||||
------------
|
||||
|
||||
- Add new network driver Network Control Model (CDC-NCM), update net_lwip_webserver to work with NCM (need re-configure example)
|
||||
- Add new USB Video Class UVC 1.5 driver and video_capture example ((work in progress)
|
||||
- Fix potential buffer overflow for HID, bluetooth drivers
|
||||
|
||||
Host Controller Driver (HCD)
|
||||
----------------------------
|
||||
|
||||
No notable changes
|
||||
|
||||
Host Stack
|
||||
----------
|
||||
|
||||
No notable changes
|
||||
|
||||
0.11.0 (2021-08-29)
|
||||
===================
|
||||
|
||||
- Add host/hid_controller example: only worked/tested with Sony PS4 DualShock controller
|
||||
- Add device/hid_boot_interface example
|
||||
- Add support for Renesas CCRX toolchain for RX mcu
|
||||
|
||||
Device Controller Driver (DCD)
|
||||
------------------------------
|
||||
|
||||
- Add new DCD port for SAMx7x (E70, S70, V70, V71)
|
||||
- Add new mcu K32L2Bxx
|
||||
- Add new mcu GD32VF103
|
||||
- Add new mcu STM32l151
|
||||
- Add new mcu SAML21
|
||||
- Add new mcu RX65n RX72n
|
||||
- Fix NUC120/121/126 USBRAM can only be accessed in byte manner. Also improve set_address & disable sof
|
||||
- Add Suspend/Resume handling for Renesas RX family.
|
||||
- Fix DA1469x no VBUS startup
|
||||
|
||||
Synopsys
|
||||
^^^^^^^^
|
||||
|
||||
- Fix Synopsys set address bug which could cause re-enumeration failed
|
||||
- Fix dcd_synopsys driver integer overflow in HS mode (issue #968)
|
||||
|
||||
nRF5x
|
||||
^^^^^
|
||||
|
||||
- Add nRF5x suspend, resume and remote wakeup
|
||||
- Fix nRF5x race condition with TASKS_EP0RCVOUT
|
||||
|
||||
RP2040
|
||||
^^^^^^
|
||||
|
||||
- Add RP2040 suspend & resume support
|
||||
- Implement double buffer for both host and device (#891). However device EPOUT is still single buffered due to techinical issue with short packet
|
||||
|
||||
Device Stack
|
||||
------------
|
||||
|
||||
USBD
|
||||
^^^^
|
||||
|
||||
- Better support big endian mcu
|
||||
- Add tuh_inited() and tud_inited(), will separate tusb_init/inited() to tud/tuh init/inited
|
||||
- Add dcd_attr.h for defining common controller attribute such as max endpoints
|
||||
|
||||
Bluetooth
|
||||
^^^^^^^^^
|
||||
|
||||
- Fix stridx error in descriptor template
|
||||
|
||||
DFU
|
||||
^^^
|
||||
|
||||
- Enhance DFU implementation to support multiple alternate interface and better support bwPollTimeout
|
||||
- Rename CFG_TUD_DFU_MODE to simply CFG_TUD_DFU
|
||||
|
||||
HID
|
||||
^^^
|
||||
|
||||
- Fix newline usage keyboard (ENTER 0x28)
|
||||
- Better support Hid Get/Set report
|
||||
- Change max gamepad support from 16 to 32 buttons
|
||||
|
||||
MIDI
|
||||
^^^^
|
||||
|
||||
- Fix midi available
|
||||
- Fix midi data
|
||||
- Fix an issue when calling midi API when not enumerated yet
|
||||
|
||||
UAC2
|
||||
^^^^
|
||||
|
||||
- Fix bug and enhance of UAC2
|
||||
|
||||
Vendor
|
||||
^^^^^^
|
||||
|
||||
- Fix vendor fifo deadlock in certain case
|
||||
- Add tud_vendor_n_read_flush
|
||||
|
||||
Host Controller Driver (HCD)
|
||||
----------------------------
|
||||
|
||||
RP2040
|
||||
^^^^^^
|
||||
|
||||
- Implement double buffered to fix E4 errata and boost performance
|
||||
- Lots of rp2040 update and enhancement
|
||||
|
||||
Host Stack
|
||||
----------
|
||||
|
||||
- Major update and rework most of host stack, still needs more improvement
|
||||
- Lots of improvement and update in parsing configuration and control
|
||||
- Rework and major update to HID driver. Will default to enable boot interface if available
|
||||
- Separate CFG_TUH_DEVICE_MAX and CFG_TUH_HUB for better management and reduce SRAM usage
|
||||
|
||||
0.10.1 (2021-06-03)
|
||||
===================
|
||||
|
||||
- rework rp2040 examples and CMake build, allow better integration with pico-sdk
|
||||
|
||||
Host Controller Driver (HCD)
|
||||
----------------------------
|
||||
|
||||
- Fix rp2040 host driver: incorrect PID with low speed device with max packet size of 8 bytes
|
||||
- Improve hub driver
|
||||
- Remove obsolete hcd_pipe_queue_xfer()/hcd_pipe_xfer()
|
||||
- Use hcd_frame_number() instead of micro frame
|
||||
- Fix OHCI endpoint address and xferred_bytes in xfer complete event
|
||||
|
||||
0.10.0 (2021-05-28)
|
||||
===================
|
||||
|
||||
- Rework tu_fifo_t with separated mutex for read and write, better support DMA with read/write buffer info. And constant address mode
|
||||
- Improve audio_test example and add audio_4_channel_mic example
|
||||
- Add new dfu example
|
||||
- Remove pico-sdk from submodule
|
||||
|
||||
Device Controller Driver (DCD)
|
||||
------------------------------
|
||||
|
||||
- Add new DCD port for Silabs EFM32GG12 with board Thunderboard Kit (SLTB009A)
|
||||
- Add new DCD port Renesas RX63N, board GR-CITRUS
|
||||
- Add new (optional) endpoint API dcd_edpt_xfer_fifo
|
||||
- Fix build with nRF5340
|
||||
- Fix build with lpc15 and lpc54
|
||||
- Fix build with lpc177x_8x
|
||||
- STM32 Synopsys: greatly improve Isochronous transfer with edpt_xfer_fifo API
|
||||
- Support LPC55 port1 highspeed
|
||||
- Add support for Espressif esp32s3
|
||||
- nRF: fix race condition that could cause drop packet of Bulk OUT transfer
|
||||
|
||||
USB Device Driver (USBD)
|
||||
------------------------
|
||||
|
||||
- Add new (optional) endpoint ADPI usbd_edpt_xfer_fifo
|
||||
|
||||
Device Class Driver
|
||||
-------------------
|
||||
|
||||
CDC
|
||||
|
||||
- [Breaking] tud_cdc_peek(), tud_vendor_peek() no longer support random offset and dropped position parameter.
|
||||
|
||||
DFU
|
||||
|
||||
- Add new DFU 1.1 class driver (WIP)
|
||||
|
||||
HID
|
||||
|
||||
- Fix keyboard report descriptor template
|
||||
- Add more hid keys constant from 0x6B to 0xA4
|
||||
|
||||
- [Breaking] rename API
|
||||
- HID_PROTOCOL_NONE/KEYBOARD/MOUST to HID_ITF_PROTOCOL_NONE/KEYBOARD/MOUSE
|
||||
- tud_hid_boot_mode() to tud_hid_get_protocol()
|
||||
- tud_hid_boot_mode_cb() to tud_hid_set_protocol_cb()
|
||||
|
||||
MIDI
|
||||
|
||||
- Fix MIDI buffer overflow issue
|
||||
|
||||
- [Breaking] rename API
|
||||
- Rename tud_midi_read() to tud_midi_stream_read()
|
||||
- Rename tud_midi_write() to tud_midi_stream_write()
|
||||
- Rename tud_midi_receive() to tud_midi_packet_read()
|
||||
- Rename tud_midi_send() to tud_midi_packet_write()
|
||||
|
||||
Host Controller Driver (HCD)
|
||||
----------------------------
|
||||
|
||||
- No noticeable changes
|
||||
|
||||
USB Host Driver (USBH)
|
||||
----------------------
|
||||
|
||||
- No noticeable changes
|
||||
|
||||
Host Class Driver
|
||||
-----------------
|
||||
|
||||
- HID: Rework host hid driver, basically everything changes
|
||||
|
||||
|
||||
0.9.0 (2021-03-12)
|
||||
==================
|
||||
|
||||
Device Stack
|
||||
------------
|
||||
|
||||
Device Controller Driver (DCD)
|
||||
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
|
||||
|
||||
RP2040
|
||||
|
||||
- Fix endpoint buffer reallocation overrun problem
|
||||
- Fix osal_pico queue overflow in initialization
|
||||
- Fix Isochronous endpoint buffer size in transfer
|
||||
- Optimize hardware endpoint struct to reduce RAM usage
|
||||
- Fix enum walkaround forever check for SE0 when pull up is disabled
|
||||
|
||||
Sony CXD56
|
||||
|
||||
- Pass the correct speed on Spresense
|
||||
- Fix setup processed flag
|
||||
|
||||
NXP Transdimention
|
||||
|
||||
- Update dcd_init() to reset controller to device mode
|
||||
|
||||
USB Device Driver (USBD)
|
||||
^^^^^^^^^^^^^^^^^^^^^^^^
|
||||
|
||||
- Fix issue with status zlp (tud_control_status) is returned by class driver with SET/CLEAR_FEATURE for endpoint.
|
||||
- Correct endpoint size check for fullspeed bulk, can be 8, 16, 32, 64
|
||||
- Ack SET_INTERFACE even if it is not implemented by class driver.
|
||||
|
||||
Device Class Driver
|
||||
^^^^^^^^^^^^^^^^^^^
|
||||
|
||||
DFU Runtime
|
||||
|
||||
- rename dfu_rt to dfu_runtime for easy reading
|
||||
|
||||
CDC
|
||||
|
||||
- Add tud_cdc_send_break_cb() to support break request
|
||||
- Improve CDC receive, minor behavior changes: when tud_cdc_rx_wanted_cb() is invoked wanted_char may not be the last byte in the fifo
|
||||
|
||||
HID
|
||||
|
||||
- [Breaking] Add itf argument to hid API to support multiple instances, follow API has signature changes
|
||||
|
||||
- tud_hid_descriptor_report_cb()
|
||||
- tud_hid_get_report_cb()
|
||||
- tud_hid_set_report_cb()
|
||||
- tud_hid_boot_mode_cb()
|
||||
- tud_hid_set_idle_cb()
|
||||
|
||||
- Add report complete callback tud_hid_report_complete_cb() API
|
||||
- Add DPad/Hat support for HID Gamepad
|
||||
|
||||
- `TUD_HID_REPORT_DESC_GAMEPAD()` now support 16 buttons, 2 joysticks, 1 hat/dpad
|
||||
- Add hid_gamepad_report_t along with `GAMEPAD_BUTTON_` and `GAMEPAD_HAT_` enum
|
||||
- Add Gamepad to hid_composite / hid_composite_freertos example
|
||||
|
||||
MIDI
|
||||
|
||||
- Fix dropping MIDI sysex message when fifo is full
|
||||
- Fix typo in tud_midi_write24(), make example less ambiguous for cable and channel
|
||||
- Fix incorrect endpoint descriptor length, MIDI v1 use Audio v1 which has 9-byte endpoint descriptor (instead of 7)
|
||||
|
||||
Host Stack
|
||||
----------
|
||||
|
||||
Host Controller Driver (HCD)
|
||||
^^^^^^^^^^^^^^^^^^^^^^^^^^^^
|
||||
|
||||
- Add rhport to hcd_init()
|
||||
- Improve EHCI/OHCI driver abstraction
|
||||
|
||||
- Move echi/ohci files to portable/
|
||||
- Rename hcd_lpc18_43 to hcd_transdimension
|
||||
- Sub hcd API with hcd_ehci_init(), hcd_ehci_register_addr()
|
||||
|
||||
- Update NXP transdimention hcd_init() to reset controller to host mode
|
||||
|
||||
- Ported hcd to rt10xx
|
||||
|
||||
USB Host Driver (USBH)
|
||||
^^^^^^^^^^^^^^^^^^^^^^
|
||||
|
||||
- No noticeable changes to usbh
|
||||
|
||||
Host Class Driver
|
||||
^^^^^^^^^^^^^^^^^
|
||||
|
||||
MSC
|
||||
|
||||
- Rename tuh_msc_scsi_inquiry() to tuh_msc_inquiry()
|
||||
- Rename tuh_msc_mounted_cb/tuh_msc_unmounted_cb to tuh_msc_mount_cb/tuh_msc_unmount_cb to match device stack naming
|
||||
- Change tuh_msc_is_busy() to tuh_msc_ready()
|
||||
- Add read10 and write10 function: tuh_msc_read10(), tuh_msc_write10()
|
||||
- Read_Capacity is invoked as part of enumeration process
|
||||
- Add tuh_msc_get_block_count(), tuh_msc_get_block_size()
|
||||
- Add CFG_TUH_MSC_MAXLUN (default to 4) to hold lun capacities
|
||||
|
||||
Others
|
||||
------
|
||||
|
||||
- Add basic support for rt-thread OS
|
||||
- Change zero bitfield length to more explicit padding
|
||||
- Build example now fetch required submodules on the fly while running `make` without prio submodule init for mcu drivers
|
||||
- Update pico-sdk to v1.1.0
|
||||
|
||||
**New Boards**
|
||||
|
||||
- Microchip SAM E54 Xplained Pro
|
||||
- LPCXpresso 55s28
|
||||
- LPCXpresso 18s37
|
||||
|
||||
|
||||
0.8.0 (2021-02-05)
|
||||
==================
|
||||
|
||||
Device Controller Driver
|
||||
------------------------
|
||||
|
||||
- Added new device support for Raspberry Pi RP2040
|
||||
- Added new device support for NXP Kinetis KL25ZXX
|
||||
- Use dcd_event_bus_reset() with link speed to replace bus_signal
|
||||
|
||||
- ESP32-S2:
|
||||
- Add bus suspend and wakeup support
|
||||
|
||||
- SAMD21:
|
||||
- Fix (walkaround) samd21 setup_packet overflow by USB DMA
|
||||
|
||||
- STM32 Synopsys:
|
||||
- Rework USB FIFO allocation scheme and allow RX FIFO size reduction
|
||||
|
||||
- Sony CXD56
|
||||
- Update Update Spresense SDK to 2.0.2
|
||||
- Fix dcd issues with setup packets
|
||||
- Correct EP number for cdc_msc example
|
||||
|
||||
USB Device
|
||||
----------
|
||||
|
||||
**USBD**
|
||||
|
||||
- Rework usbd control transfer to have additional stage parameter for setup, data, status
|
||||
- Fix tusb_init() return true instead of TUSB_ERROR_NONE
|
||||
- Added new API tud_connected() that return true after device got out of bus reset and received the very first setup packet
|
||||
|
||||
**Class Driver**
|
||||
|
||||
- CDC
|
||||
- Allow to transmit data, even if the host does not support control line states i.e set DTR
|
||||
|
||||
- HID
|
||||
- change default CFG_TUD_HID_EP_BUFSIZE from 16 to 64
|
||||
|
||||
- MIDI
|
||||
- Fix midi sysex sending bug
|
||||
|
||||
- MSC
|
||||
- Invoke only scsi complete callback after status transaction is complete.
|
||||
- Fix scsi_mode_sense6_t padding, which cause IAR compiler internal error.
|
||||
|
||||
- USBTMC
|
||||
- Change interrupt endpoint example size to 8 instead of 2 for better compatibility with mcu
|
||||
|
||||
**Example**
|
||||
|
||||
- Support make from windows cmd.exe
|
||||
- Add HID Consumer Control (media keys) to hid_composite & hid_composite_freertos examples
|
||||
|
||||
|
||||
USB Host
|
||||
--------
|
||||
|
||||
No noticeable changes to host stack
|
||||
|
||||
New Boards
|
||||
----------
|
||||
|
||||
- NXP/Freescale Freedom FRDM-KL25Z
|
||||
- Feather Double M33 express
|
||||
- Raspberry Pi Pico
|
||||
- Adafruit Feather RP2040
|
||||
- Adafruit Itsy Bitsy RP2040
|
||||
- Adafruit QT RP2040
|
||||
- Adfruit Feather ESP32-S2
|
||||
- Adafruit Magtag 29" Eink
|
||||
- Adafruit Metro ESP32-S2
|
||||
- Adafruit PyBadge
|
||||
- Adafruit PyPortal
|
||||
- Great Scott Gadgets' LUNA D11 & D21
|
||||
|
||||
|
||||
0.7.0 (2020-11-08)
|
||||
==================
|
||||
|
||||
Device Controller Driver
|
||||
------------------------
|
||||
|
||||
- Added new support for Espressif ESP32-S2
|
||||
- Added new support for Dialog DA1469x
|
||||
- Enhance STM32 Synopsys
|
||||
|
||||
- Support bus events disconnection/suspend/resume/wakeup
|
||||
- Improve transfer performance with optimizing xfer and fifo size
|
||||
- Support Highspeed port (OTG_HS) with both internal and external PHY
|
||||
- Support multiple usb ports with rhport=1 is highspeed on selected MCUs e.g H743, F23. It is possible to have OTG_HS to run on Fullspeed PHY (e.g lacking external PHY)
|
||||
- Add ISO transfer, fix odd/even frame
|
||||
- Fix FIFO flush during stall
|
||||
- Implement dcd_edpt_close() API
|
||||
- Support F105, F107
|
||||
|
||||
- Enhance STM32 fsdev
|
||||
- Improve dcd fifo allocation
|
||||
- Fix ISTR race condition
|
||||
- Support remap USB IRQ on supported MCUs
|
||||
- Implement dcd_edpt_close() API
|
||||
|
||||
- Enhance NUC 505: enhance set configure behavior
|
||||
|
||||
- Enhance SAMD
|
||||
- Fix race condition with setup packet
|
||||
- Add SAMD11 option `OPT_MCU_SAMD11`
|
||||
- Add SAME5x option `OPT_MCU_SAME5X`
|
||||
|
||||
- Fix SAMG control data toggle and stall race condition
|
||||
|
||||
- Enhance nRF
|
||||
- Fix hanged when tud_task() is called within critical section (disabled interrupt)
|
||||
- Fix disconnect bus event not submitted
|
||||
- Implement ISO transfer and dcd_edpt_close()
|
||||
|
||||
|
||||
USB Device
|
||||
----------
|
||||
|
||||
**USBD**
|
||||
|
||||
- Add new class driver for **Bluetooth HCI** class driver with example can be found in [mynewt-tinyusb-example](https://github.com/hathach/mynewt-tinyusb-example) since it needs mynewt OS to run with.
|
||||
- Fix USBD endpoint usage racing condition with `usbd_edpt_claim()/usbd_edpt_release()`
|
||||
- Added `tud_task_event_ready()` and `osal_queue_empty()`. This API is needed to check before enter low power mode with WFI/WFE
|
||||
- Rename USB IRQ Handler to `dcd_int_handler()`. Application must define IRQ handler in which it calls this API.
|
||||
- Add `dcd_connect()` and `dcd_disconnect()` to enable/disable internal pullup on D+/D- on supported MCUs.
|
||||
- Add `usbd_edpt_open()`
|
||||
- Remove `dcd_set_config()`
|
||||
- Add *OPT_OS_CUMSTOM* as hook for application to overwrite and/or add their own OS implementation
|
||||
- Support SET_INTERFACE, GET_INTERFACE request
|
||||
- Add Logging for debug with optional uart/rtt/swo printf retarget or `CFG_TUSB_DEBUG_PRINTF` hook
|
||||
- Add IAR compiler support
|
||||
- Support multiple configuration descriptors. `TUD_CONFIG_DESCRIPTOR()` template has extra config_num as 1st argument
|
||||
- Improve USB Highspeed support with actual link speed detection with `dcd_event_bus_reset()`
|
||||
|
||||
- Enhance class driver management
|
||||
- `usbd_driver_open()` add max length argument, and return length of interface (0 for not supported). Return value is used for finding appropriate driver
|
||||
- Add application implemented class driver via `usbd_app_driver_get_cb()`
|
||||
- IAD is handled to assign driver id
|
||||
|
||||
- Added `tud_descriptor_device_qualifier_cb()` callback
|
||||
- Optimize `tu_fifo` bulk write/read transfer
|
||||
- Forward non-std control request to class driver
|
||||
- Let application handle Microsoft OS 1.0 Descriptors (the 0xEE index string)
|
||||
- Fix OSAL FreeRTOS yield from ISR
|
||||
|
||||
**Class Drivers**
|
||||
|
||||
- USBNET: remove ACM-EEM due to lack of support from host
|
||||
- USBTMC: fix descriptors when INT EP is disabled
|
||||
|
||||
- CDC:
|
||||
- Send zero length packet for end of data when needed
|
||||
- Add `tud_cdc_tx_complete_cb()` callback
|
||||
- Change tud_cdc_n_write_flush() return number of bytes forced to transfer, and flush when writing enough data to fifo
|
||||
|
||||
- MIDI:
|
||||
- Add packet interface
|
||||
- Add multiple jack descriptors
|
||||
- Fix MIDI driver for sysex
|
||||
|
||||
- DFU Runtime: fix response to SET_INTERFACE and DFU_GETSTATUS request
|
||||
|
||||
- Rename some configure macro to make it clear that those are used directly for endpoint transfer
|
||||
- CFG_TUD_HID_BUFSIZE to CFG_TUD_HID_EP_BUFSIZE
|
||||
- CFG_TUD_CDC_EPSIZE to CFG_TUD_CDC_EP_BUFSIZE
|
||||
- CFG_TUD_MSC_BUFSIZE to CFG_TUD_MSC_EP_BUFSIZE
|
||||
- CFG_TUD_MIDI_EPSIZE to CFG_TUD_MIDI_EP_BUFSIZE
|
||||
|
||||
- HID:
|
||||
- Fix gamepad template descriptor
|
||||
- Add multiple HID interface API
|
||||
- Add extra comma to HID_REPORT_ID
|
||||
|
||||
USB Host
|
||||
--------
|
||||
|
||||
- Rework USB host stack (still work in progress)
|
||||
- Fix compile error with pipehandle
|
||||
- Rework usbh control and enumeration as non-blocking
|
||||
|
||||
- Improve Hub, MSC, HID host driver
|
||||
|
||||
Examples
|
||||
--------
|
||||
|
||||
- Add new hid_composite_freertos
|
||||
- Add new dynamic_configuration to demonstrate how to switch configuration descriptors
|
||||
- Add new hid_multiple_interface
|
||||
|
||||
- Enhance `net_lwip_webserver` example
|
||||
- Add multiple configuration: RNDIS for Windows, CDC-ECM for macOS (Linux will work with both)
|
||||
- Update lwip to STABLE-2_1_2_RELEASE for net_lwip_webserver
|
||||
|
||||
- Added new Audio example: audio_test uac2_headsest
|
||||
|
||||
New Boards
|
||||
----------
|
||||
|
||||
- Espressif ESP32-S2: saola_1, kaluga_1
|
||||
- STM32: F746 Nucleo, H743 Eval, H743 Nucleo, F723 discovery, stlink v3 mini, STM32L4r5 Nucleo
|
||||
- Dialog DA1469x dk pro and dk usb
|
||||
- Microchip: Great Scoot Gadgets' LUNA, samd11_xplained, D5035-01, atsamd21 xplained pro
|
||||
- nRF: ItsyBitsy nRF52840
|
||||
|
||||
|
||||
0.6.0 (2020-03-30)
|
||||
==================
|
||||
|
||||
Added **CONTRIBUTORS.md** to give proper credit for contributors to the stack. Special thanks to `Nathan Conrad <https://github.com/pigrew>`__ , `Peter Lawrence <https://github.com/majbthrd>`__ , `William D. Jones <https://github.com/cr1901>`__ and `Sean Cross <https://github.com/xobs>`__ and others for spending their precious time to add lots of features and ports for this release.
|
||||
|
||||
Added
|
||||
-----
|
||||
|
||||
**MCU**
|
||||
|
||||
- Added support for Microchip SAMG55
|
||||
- Added support for Nordic nRF52833
|
||||
- Added support for Nuvoton: NUC120, NUC121/NUC125, NUC126, NUC505
|
||||
- Added support for NXP LPC: 51Uxx, 54xxx, 55xx
|
||||
- Added support for NXP iMXRT: RT1011, RT1015, RT1021, RT1052, RT1062, RT1064
|
||||
- Added support for Sony CXD56 (Spresense)
|
||||
- Added support for STM32: L0, F0, F1, F2, F3, F4, F7, H7
|
||||
- Added support for TI MSP430
|
||||
- Added support for ValentyUSB's eptri
|
||||
|
||||
**Class Driver**
|
||||
|
||||
- Added DFU Runtime class driver
|
||||
- Added Network class driver with RNDIS, CDC-ECM, CDC-EEM (work in progress)
|
||||
- Added USBTMC class driver
|
||||
- Added WebUSB class driver using vendor-specific class
|
||||
- Added multiple instances support for CDC and MIDI
|
||||
- Added a handful of unit test with Ceedling.
|
||||
- Added LOG support for debugging with CFG_TUSB_DEBUG
|
||||
- Added `tud_descriptor_bos_cb()` for BOS descriptor (required for USB 2.1)
|
||||
- Added `dcd_edpt0_status_complete()` as optional API for DCD
|
||||
|
||||
**Examples**
|
||||
|
||||
Following examples are added:
|
||||
|
||||
- board_test
|
||||
- cdc_dual_ports
|
||||
- dfu_rt
|
||||
- hid_composite
|
||||
- net_lwip_webserver
|
||||
- usbtmc
|
||||
- webusb_serial
|
||||
|
||||
Changed
|
||||
-------
|
||||
|
||||
- Changed `tud_descriptor_string_cb()` to have additional Language ID argument
|
||||
- Merged hal_nrf5x.c into dcd_nrf5x.c
|
||||
- Merged dcd_samd21.c and dcd_samd51.c into dcd_samd.c
|
||||
- Generalized dcd_stm32f4.c to dcd_synopsys.c
|
||||
- Changed cdc_msc_hid to cdc_msc (drop hid) due to limited endpoints number of some MCUs
|
||||
- Improved DCD SAMD stability, fix missing setup packet occasionally
|
||||
- Improved usbd/usbd_control with proper handling of zero-length packet (ZLP)
|
||||
- Improved STM32 DCD FSDev
|
||||
- Improved STM32 DCD Synopsys
|
||||
- Migrated CI from Travis to Github Action
|
||||
- Updated nrfx submodule to 2.1.0
|
||||
- Fixed mynewt osal queue definition
|
||||
- Fixed cdc_msc_freertos example build for all MCUs
|
||||
|
||||
|
||||
0.5.0 (2019-06)
|
||||
===============
|
||||
|
||||
First release, device stack works great, host stack works but still need improvement.
|
||||
|
||||
- Special thanks to @adafruit team, especially @tannewt to help out immensely to rework device stack: simplify osal & control transfer, adding SAMD21/SAMD51 ports, writing porting docs, adding MIDI class support etc...
|
||||
- Thanks to @cr1901 for adding STM32F4 port.
|
||||
- Thanks to @PTS93 and @todbot for HID raw API
|
||||
1
docs/info/contributors.rst
Symbolic link
1
docs/info/contributors.rst
Symbolic link
@ -0,0 +1 @@
|
||||
../../CONTRIBUTORS.rst
|
||||
13
docs/info/index.rst
Normal file
13
docs/info/index.rst
Normal file
@ -0,0 +1,13 @@
|
||||
****
|
||||
Info
|
||||
****
|
||||
|
||||
Index
|
||||
=====
|
||||
|
||||
.. toctree::
|
||||
:maxdepth: 2
|
||||
|
||||
uses
|
||||
changelog
|
||||
contributors
|
||||
17
docs/info/uses.rst
Normal file
17
docs/info/uses.rst
Normal file
@ -0,0 +1,17 @@
|
||||
****
|
||||
Uses
|
||||
****
|
||||
|
||||
TinyUSB is currently used by these other projects:
|
||||
|
||||
- `Adafruit nRF52 Arduino <https://github.com/adafruit/Adafruit_nRF52_Arduino>`__
|
||||
- `Adafruit nRF52 Bootloader <https://github.com/adafruit/Adafruit_nRF52_Bootloader>`__
|
||||
- `Adafruit SAMD Arduino <https://github.com/adafruit/ArduinoCore-samd>`__
|
||||
- `CircuitPython <https://github.com/adafruit/circuitpython>`__
|
||||
- `Espressif IDF <https://github.com/espressif/esp-idf>`__
|
||||
- `MicroPython <https://github.com/micropython/micropython>`__
|
||||
- `mynewt <https://mynewt.apache.org>`__
|
||||
- `openinput <https://github.com/openinput-fw/openinput>`__
|
||||
- `Raspberry Pi Pico SDK <https://github.com/raspberrypi/pico-sdk>`__
|
||||
- `TinyUF2 Bootloader <https://github.com/adafruit/tinyuf2>`__
|
||||
- `TinyUSB Arduino Library <https://github.com/adafruit/Adafruit_TinyUSB_Arduino>`__
|
||||
@ -1,36 +1,42 @@
|
||||
# Concurrency
|
||||
***********
|
||||
Concurrency
|
||||
***********
|
||||
|
||||
The TinyUSB library is designed to operate on single-core MCUs with multi-threaded applications in mind. Interaction with interrupts is especially important to pay attention to.
|
||||
It is compatible with optionally using a RTOS.
|
||||
|
||||
## General
|
||||
General
|
||||
-------
|
||||
|
||||
When writing code, keep in mind that the OS (if using a RTOS) may swap out your code at any time. Also, your code can be preempted by an interrupt at any time.
|
||||
|
||||
## Application Code
|
||||
Application Code
|
||||
----------------
|
||||
|
||||
The USB core does not execute application callbacks while in an interrupt context. Calls to application code are from within the USB core task context. Note that the application core will call class drivers from within their own task.
|
||||
|
||||
## Class Drivers
|
||||
Class Drivers
|
||||
-------------
|
||||
|
||||
Class driver code should never be called from an interrupt context by the USB core, though the application is allowed to call class driver functions from interrupts. USB core functions may be called simultaneously by multiple tasks. Use care that proper locking is used to guard the USBD core functions from this case.
|
||||
|
||||
Class drivers are allowed to call `usbd_*` functions, but not `dcd_*` functions.
|
||||
Class drivers are allowed to call ``usbd_*`` functions, but not ``dcd_*`` functions.
|
||||
|
||||
## USB Core
|
||||
USB Core
|
||||
--------
|
||||
|
||||
All functions that may be called from an (USB core) interrupt context have a `bool in_isr` parameter to remind the implementer that special care must be taken.
|
||||
All functions that may be called from an (USB core) interrupt context have a ``bool in_isr`` parameter to remind the implementer that special care must be taken.
|
||||
|
||||
Interrupt handlers must not directly call class driver code, they must pass a message to the USB core's task.
|
||||
|
||||
`usbd_*` functions may be called from interrupts without any notice. They may also be called simultaneously by multiple tasks.
|
||||
``usbd_*`` functions may be called from interrupts without any notice. They may also be called simultaneously by multiple tasks.
|
||||
|
||||
## Device Drivers
|
||||
Device Drivers
|
||||
--------------
|
||||
|
||||
Much of the processing of the USB stack is done in an interrupt context, and care must be taken in order to ensure variables are handled in the appropriate ways by the compiler and optimizer.
|
||||
|
||||
In particular:
|
||||
|
||||
- Ensure that all memory-mapped registers (including packet memory) are marked as volatile. GCC's optimizer will even combine memory access (like two 16-bit to be a 32-bit) if you don't mark the pointers as volatile. On some architectures, this can use macros like `_I`, `_O`, or `_IO'.
|
||||
- All defined global variables are marked as `static`.
|
||||
|
||||
* Ensure that all memory-mapped registers (including packet memory) are marked as volatile. GCC's optimizer will even combine memory access (like two 16-bit to be a 32-bit) if you don't mark the pointers as volatile. On some architectures, this can use macros like _I , _O , or _IO.
|
||||
* All defined global variables are marked as ``static``.
|
||||
64
docs/reference/dependencies.rst
Normal file
64
docs/reference/dependencies.rst
Normal file
@ -0,0 +1,64 @@
|
||||
************
|
||||
Dependencies
|
||||
************
|
||||
|
||||
MCU low-level peripheral driver and external libraries for building TinyUSB examples
|
||||
|
||||
======================================== ============================================================== ======================================== =======================================================================================================================================================================================================
|
||||
Local Path Repo Commit Required by
|
||||
======================================== ============================================================== ======================================== =======================================================================================================================================================================================================
|
||||
hw/mcu/allwinner https://github.com/hathach/allwinner_driver.git 8e5e89e8e132c0fd90e72d5422e5d3d68232b756 fc100s
|
||||
hw/mcu/bridgetek/ft9xx/ft90x-sdk https://github.com/BRTSG-FOSS/ft90x-sdk.git 91060164afe239fcb394122e8bf9eb24d3194eb1 brtmm90x
|
||||
hw/mcu/broadcom https://github.com/adafruit/broadcom-peripherals.git 08370086080759ed54ac1136d62d2ad24c6fa267 broadcom_32bit broadcom_64bit
|
||||
hw/mcu/gd/nuclei-sdk https://github.com/Nuclei-Software/nuclei-sdk.git 7eb7bfa9ea4fbeacfafe1d5f77d5a0e6ed3922e7 gd32vf103
|
||||
hw/mcu/infineon/mtb-xmclib-cat3 https://github.com/Infineon/mtb-xmclib-cat3.git daf5500d03cba23e68c2f241c30af79cd9d63880 xmc4000
|
||||
hw/mcu/microchip https://github.com/hathach/microchip_driver.git 9e8b37e307d8404033bb881623a113931e1edf27 sam3x samd11 samd21 samd51 same5x same7x saml2x samg
|
||||
hw/mcu/mindmotion/mm32sdk https://github.com/hathach/mm32sdk.git 0b79559eb411149d36e073c1635c620e576308d4 mm32
|
||||
hw/mcu/nordic/nrfx https://github.com/NordicSemiconductor/nrfx.git 2527e3c8449cfd38aee41598e8af8492f410ed15 nrf
|
||||
hw/mcu/nuvoton https://github.com/majbthrd/nuc_driver.git 2204191ec76283371419fbcec207da02e1bc22fa nuc
|
||||
hw/mcu/nxp/lpcopen https://github.com/hathach/nxp_lpcopen.git 84e0bd3e43910aaf71eefd62075cf57495418312 lpc11 lpc13 lpc15 lpc17 lpc18 lpc40 lpc43
|
||||
hw/mcu/nxp/mcux-sdk https://github.com/hathach/mcux-sdk.git 950819b7de9b32f92c3edf396bc5ffb8d66e7009 kinetis_k32l2 kinetis_kl lpc51 lpc54 lpc55 mcx imxrt
|
||||
hw/mcu/raspberry_pi/Pico-PIO-USB https://github.com/sekigon-gonnoc/Pico-PIO-USB.git d00a10a8c425d0d40f81b87169102944b01f3bb3 rp2040
|
||||
hw/mcu/renesas/fsp https://github.com/renesas/fsp.git d52e5a6a59b7c638da860c2bb309b6e78e752ff8 ra
|
||||
hw/mcu/renesas/rx https://github.com/kkitayam/rx_device.git 706b4e0cf485605c32351e2f90f5698267996023 rx
|
||||
hw/mcu/silabs/cmsis-dfp-efm32gg12b https://github.com/cmsis-packs/cmsis-dfp-efm32gg12b.git f1c31b7887669cb230b3ea63f9b56769078960bc efm32
|
||||
hw/mcu/sony/cxd56/spresense-exported-sdk https://github.com/sonydevworld/spresense-exported-sdk.git 2ec2a1538362696118dc3fdf56f33dacaf8f4067 spresense
|
||||
hw/mcu/st/cmsis_device_f0 https://github.com/STMicroelectronics/cmsis_device_f0.git 2fc25ee22264bc27034358be0bd400b893ef837e stm32f0
|
||||
hw/mcu/st/cmsis_device_f1 https://github.com/STMicroelectronics/cmsis_device_f1.git 6601104a6397299b7304fd5bcd9a491f56cb23a6 stm32f1
|
||||
hw/mcu/st/cmsis_device_f2 https://github.com/STMicroelectronics/cmsis_device_f2.git 182fcb3681ce116816feb41b7764f1b019ce796f stm32f2
|
||||
hw/mcu/st/cmsis_device_f3 https://github.com/STMicroelectronics/cmsis_device_f3.git 5e4ee5ed7a7b6c85176bb70a9fd3c72d6eb99f1b stm32f3
|
||||
hw/mcu/st/cmsis_device_f4 https://github.com/STMicroelectronics/cmsis_device_f4.git 2615e866fa48fe1ff1af9e31c348813f2b19e7ec stm32f4
|
||||
hw/mcu/st/cmsis_device_f7 https://github.com/STMicroelectronics/cmsis_device_f7.git fc676ef1ad177eb874eaa06444d3d75395fc51f4 stm32f7
|
||||
hw/mcu/st/cmsis_device_g0 https://github.com/STMicroelectronics/cmsis_device_g0.git 3a23e1224417f3f2d00300ecd620495e363f2094 stm32g0
|
||||
hw/mcu/st/cmsis_device_g4 https://github.com/STMicroelectronics/cmsis_device_g4.git ce822adb1dc552b3aedd13621edbc7fdae124878 stm32g4
|
||||
hw/mcu/st/cmsis_device_h7 https://github.com/STMicroelectronics/cmsis_device_h7.git 60dc2c913203dc8629dc233d4384dcc41c91e77f stm32h7
|
||||
hw/mcu/st/cmsis_device_l0 https://github.com/STMicroelectronics/cmsis_device_l0.git 06748ca1f93827befdb8b794402320d94d02004f stm32l0
|
||||
hw/mcu/st/cmsis_device_l1 https://github.com/STMicroelectronics/cmsis_device_l1.git 7f16ec0a1c4c063f84160b4cc6bf88ad554a823e stm32l1
|
||||
hw/mcu/st/cmsis_device_l4 https://github.com/STMicroelectronics/cmsis_device_l4.git 6ca7312fa6a5a460b5a5a63d66da527fdd8359a6 stm32l4
|
||||
hw/mcu/st/cmsis_device_l5 https://github.com/STMicroelectronics/cmsis_device_l5.git d922865fc0326a102c26211c44b8e42f52c1e53d stm32l5
|
||||
hw/mcu/st/cmsis_device_u5 https://github.com/STMicroelectronics/cmsis_device_u5.git 06d7edade7167b0eafdd550bf77cfc4fa98eae2e stm32u5
|
||||
hw/mcu/st/cmsis_device_wb https://github.com/STMicroelectronics/cmsis_device_wb.git 9c5d1920dd9fabbe2548e10561d63db829bb744f stm32wb
|
||||
hw/mcu/st/stm32f0xx_hal_driver https://github.com/STMicroelectronics/stm32f0xx_hal_driver.git 0e95cd88657030f640a11e690a8a5186c7712ea5 stm32f0
|
||||
hw/mcu/st/stm32f1xx_hal_driver https://github.com/STMicroelectronics/stm32f1xx_hal_driver.git 1dd9d3662fb7eb2a7f7d3bc0a4c1dc7537915a29 stm32f1
|
||||
hw/mcu/st/stm32f2xx_hal_driver https://github.com/STMicroelectronics/stm32f2xx_hal_driver.git c75ace9b908a9aca631193ebf2466963b8ea33d0 stm32f2
|
||||
hw/mcu/st/stm32f3xx_hal_driver https://github.com/STMicroelectronics/stm32f3xx_hal_driver.git 1761b6207318ede021706e75aae78f452d72b6fa stm32f3
|
||||
hw/mcu/st/stm32f4xx_hal_driver https://github.com/STMicroelectronics/stm32f4xx_hal_driver.git 04e99fbdabd00ab8f370f377c66b0a4570365b58 stm32f4
|
||||
hw/mcu/st/stm32f7xx_hal_driver https://github.com/STMicroelectronics/stm32f7xx_hal_driver.git f7ffdf6bf72110e58b42c632b0a051df5997e4ee stm32f7
|
||||
hw/mcu/st/stm32g0xx_hal_driver https://github.com/STMicroelectronics/stm32g0xx_hal_driver.git e911b12c7f67084d7f6b76157a4c0d4e2ec3779c stm32g0
|
||||
hw/mcu/st/stm32g4xx_hal_driver https://github.com/STMicroelectronics/stm32g4xx_hal_driver.git 8b4518417706d42eef5c14e56a650005abf478a8 stm32g4
|
||||
hw/mcu/st/stm32h7xx_hal_driver https://github.com/STMicroelectronics/stm32h7xx_hal_driver.git d8461b980b59b1625207d8c4f2ce0a9c2a7a3b04 stm32h7
|
||||
hw/mcu/st/stm32l0xx_hal_driver https://github.com/STMicroelectronics/stm32l0xx_hal_driver.git fbdacaf6f8c82a4e1eb9bd74ba650b491e97e17b stm32l0
|
||||
hw/mcu/st/stm32l1xx_hal_driver https://github.com/STMicroelectronics/stm32l1xx_hal_driver.git 44efc446fa69ed8344e7fd966e68ed11043b35d9 stm32l1
|
||||
hw/mcu/st/stm32l4xx_hal_driver https://github.com/STMicroelectronics/stm32l4xx_hal_driver.git aee3d5bf283ae5df87532b781bdd01b7caf256fc stm32l4
|
||||
hw/mcu/st/stm32l5xx_hal_driver https://github.com/STMicroelectronics/stm32l5xx_hal_driver.git 675c32a75df37f39d50d61f51cb0dcf53f07e1cb stm32l5
|
||||
hw/mcu/st/stm32u5xx_hal_driver https://github.com/STMicroelectronics/stm32u5xx_hal_driver.git 4d93097a67928e9377e655ddd14622adc31b9770 stm32u5
|
||||
hw/mcu/st/stm32wbxx_hal_driver https://github.com/STMicroelectronics/stm32wbxx_hal_driver.git 2c5f06638be516c1b772f768456ba637f077bac8 stm32wb
|
||||
hw/mcu/ti https://github.com/hathach/ti_driver.git 143ed6cc20a7615d042b03b21e070197d473e6e5 msp430 msp432e4 tm4c123
|
||||
hw/mcu/wch/ch32f20x https://github.com/openwch/ch32f20x.git 77c4095087e5ed2c548ec9058e655d0b8757663b ch32f20x
|
||||
hw/mcu/wch/ch32v307 https://github.com/openwch/ch32v307.git 17761f5cf9dbbf2dcf665b7c04934188add20082 ch32v307
|
||||
lib/CMSIS_5 https://github.com/ARM-software/CMSIS_5.git 20285262657d1b482d132d20d755c8c330d55c1f imxrt kinetis_k32l2 kinetis_kl lpc51 lpc54 lpc55 mcx mm32 msp432e4 nrf ra saml2xstm32f0 stm32f1 stm32f2 stm32f3 stm32f4 stm32f7 stm32g0 stm32g4 stm32h7 stm32l0 stm32l1 stm32l4 stm32l5 stm32u5 stm32wb
|
||||
lib/FreeRTOS-Kernel https://github.com/FreeRTOS/FreeRTOS-Kernel.git 4ff01a7a4a51f53b44496aefee1e3c0071b7b173 all
|
||||
lib/lwip https://github.com/lwip-tcpip/lwip.git 159e31b689577dbf69cf0683bbaffbd71fa5ee10 all
|
||||
lib/sct_neopixel https://github.com/gsteiert/sct_neopixel.git e73e04ca63495672d955f9268e003cffe168fcd8 lpc55
|
||||
tools/uf2 https://github.com/microsoft/uf2.git 19615407727073e36d81bf239c52108ba92e7660 all
|
||||
======================================== ============================================================== ======================================== =======================================================================================================================================================================================================
|
||||
229
docs/reference/getting_started.rst
Normal file
229
docs/reference/getting_started.rst
Normal file
@ -0,0 +1,229 @@
|
||||
***************
|
||||
Getting Started
|
||||
***************
|
||||
|
||||
Add TinyUSB to your project
|
||||
---------------------------
|
||||
|
||||
It is relatively simple to incorporate tinyusb to your project
|
||||
|
||||
* Copy or ``git submodule`` this repo into your project in a subfolder. Let's say it is *your_project/tinyusb*
|
||||
* Add all the .c in the ``tinyusb/src`` folder to your project
|
||||
* Add *your_project/tinyusb/src* to your include path. Also make sure your current include path also contains the configuration file tusb_config.h.
|
||||
* Make sure all required macros are all defined properly in tusb_config.h (configure file in demo application is sufficient, but you need to add a few more such as CFG_TUSB_MCU, CFG_TUSB_OS since they are passed by IDE/compiler to maintain a unique configure for all boards).
|
||||
* If you use the device stack, make sure you have created/modified usb descriptors for your own need. Ultimately you need to implement all **tud descriptor** callbacks for the stack to work.
|
||||
* Add tusb_init() call to your reset initialization code.
|
||||
* Call ``tud_int_handler()`` (device) and/or ``tuh_int_handler()`` (host) in your USB IRQ Handler
|
||||
* Implement all enabled classes's callbacks.
|
||||
* If you don't use any RTOSes at all, you need to continuously and/or periodically call tud_task()/tuh_task() function. All of the callbacks and functionality are handled and invoked within the call of that task runner.
|
||||
|
||||
.. code-block::
|
||||
|
||||
int main(void)
|
||||
{
|
||||
your_init_code();
|
||||
tusb_init(); // initialize tinyusb stack
|
||||
|
||||
while(1) // the mainloop
|
||||
{
|
||||
your_application_code();
|
||||
|
||||
tud_task(); // device task
|
||||
tuh_task(); // host task
|
||||
}
|
||||
}
|
||||
|
||||
Examples
|
||||
--------
|
||||
|
||||
For your convenience, TinyUSB contains a handful of examples for both host and device with/without RTOS to quickly test the functionality as well as demonstrate how API() should be used. Most examples will work on most of `the supported boards <supported.rst>`_. Firstly we need to ``git clone`` if not already
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ git clone https://github.com/hathach/tinyusb tinyusb
|
||||
$ cd tinyusb
|
||||
|
||||
Some ports will also require a port-specific SDK (e.g. RP2040) or binary (e.g. Sony Spresense) to build examples. They are out of scope for tinyusb, you should download/install it first according to its manufacturer guide.
|
||||
|
||||
Dependencies
|
||||
^^^^^^^^^^^^
|
||||
|
||||
The hardware code is located in ``hw/bsp`` folder, and is organized by family/boards. e.g raspberry_pi_pico is located in ``hw/bsp/rp2040/boards/raspberry_pi_pico`` where FAMILY=rp2040 and BOARD=raspberry_pi_pico. Before building, we firstly need to download dependencies such as: MCU low-level peripheral driver and external libraries e.g FreeRTOS (required by some examples). We can do that by either ways:
|
||||
|
||||
1. Run ``tools/get_deps.py {FAMILY}`` script to download all dependencies for a family as follow. Note: For TinyUSB developer to download all dependencies, use FAMILY=all.
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ python tools/get_deps.py rp2040
|
||||
|
||||
2. Or run the ``get-deps`` target in one of the example folder as follow.
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ cd examples/device/cdc_msc
|
||||
$ make BOARD=raspberry_pi_pico get-deps
|
||||
|
||||
You only need to do this once per family. Check out `complete list of dependencies and their designated path here <dependencies.rst>`_
|
||||
|
||||
Build
|
||||
^^^^^
|
||||
|
||||
To build example, first change directory to an example folder.
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ cd examples/device/cdc_msc
|
||||
|
||||
Then compile with ``make BOARD={board_name} all`` , for example
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ make BOARD=raspberry_pi_pico all
|
||||
|
||||
Note: some examples especially those that uses Vendor class (e.g webUSB) may requires udev permission on Linux (and/or macOS) to access usb device. It depends on your OS distro, typically copy ``99-tinyusb.rules`` and reload your udev is good to go
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ cp examples/device/99-tinyusb.rules /etc/udev/rules.d/
|
||||
$ sudo udevadm control --reload-rules && sudo udevadm trigger
|
||||
|
||||
RootHub Port Selection
|
||||
~~~~~~~~~~~~~~~~~~~~~~
|
||||
|
||||
If a board has several ports, one port is chosen by default in the individual board.mk file. Use option ``PORT=x`` To choose another port. For example to select the HS port of a STM32F746Disco board, use:
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ make BOARD=stm32f746disco PORT=1 all
|
||||
|
||||
Port Speed
|
||||
~~~~~~~~~~
|
||||
|
||||
A MCU can support multiple operational speed. By default, the example build system will use the fastest supported on the board. Use option ``SPEED=full/high`` e.g To force F723 operate at full instead of default high speed
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ make BOARD=stm32f746disco SPEED=full all
|
||||
|
||||
Size Analysis
|
||||
~~~~~~~~~~~~~
|
||||
|
||||
First install `linkermap tool <https://github.com/hathach/linkermap>`_ then ``linkermap`` target can be used to analyze code size. You may want to compile with ``NO_LTO=1`` since -flto merges code across .o files and make it difficult to analyze.
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ make BOARD=feather_nrf52840_express NO_LTO=1 all linkermap
|
||||
|
||||
Debug
|
||||
^^^^^
|
||||
|
||||
To compile for debugging add ``DEBUG=1``\ , for example
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ make BOARD=feather_nrf52840_express DEBUG=1 all
|
||||
|
||||
Log
|
||||
~~~
|
||||
|
||||
Should you have an issue running example and/or submitting an bug report. You could enable TinyUSB built-in debug logging with optional ``LOG=``. LOG=1 will only print out error message, LOG=2 print more information with on-going events. LOG=3 or higher is not used yet.
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ make BOARD=feather_nrf52840_express LOG=2 all
|
||||
|
||||
Logger
|
||||
~~~~~~
|
||||
|
||||
By default log message is printed via on-board UART which is slow and take lots of CPU time comparing to USB speed. If your board support on-board/external debugger, it would be more efficient to use it for logging. There are 2 protocols:
|
||||
|
||||
|
||||
* `LOGGER=rtt`: use `Segger RTT protocol <https://www.segger.com/products/debug-probes/j-link/technology/about-real-time-transfer/>`_
|
||||
|
||||
* Cons: requires jlink as the debugger.
|
||||
* Pros: work with most if not all MCUs
|
||||
* Software viewer is JLink RTT Viewer/Client/Logger which is bundled with JLink driver package.
|
||||
|
||||
* ``LOGGER=swo``\ : Use dedicated SWO pin of ARM Cortex SWD debug header.
|
||||
|
||||
* Cons: only work with ARM Cortex MCUs minus M0
|
||||
* Pros: should be compatible with more debugger that support SWO.
|
||||
* Software viewer should be provided along with your debugger driver.
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ make BOARD=feather_nrf52840_express LOG=2 LOGGER=rtt all
|
||||
$ make BOARD=feather_nrf52840_express LOG=2 LOGGER=swo all
|
||||
|
||||
Flash
|
||||
^^^^^
|
||||
|
||||
``flash`` target will use the default on-board debugger (jlink/cmsisdap/stlink/dfu) to flash the binary, please install those support software in advance. Some board use bootloader/DFU via serial which is required to pass to make command
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ make BOARD=feather_nrf52840_express flash
|
||||
$ make SERIAL=/dev/ttyACM0 BOARD=feather_nrf52840_express flash
|
||||
|
||||
Since jlink can be used with most of the boards, there is also ``flash-jlink`` target for your convenience.
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ make BOARD=feather_nrf52840_express flash-jlink
|
||||
|
||||
Some board use uf2 bootloader for drag & drop in to mass storage device, uf2 can be generated with ``uf2`` target
|
||||
|
||||
.. code-block::
|
||||
|
||||
$ make BOARD=feather_nrf52840_express all uf2
|
||||
|
||||
IAR Support
|
||||
-----------
|
||||
|
||||
Use project connection
|
||||
^^^^^^^^^^^^^^^^^^^^^^
|
||||
|
||||
IAR Project Connection files are provided to import TinyUSB stack into your project.
|
||||
|
||||
* A buldable project of your MCU need to be created in advance.
|
||||
|
||||
|
||||
* Take example of STM32F0:
|
||||
|
||||
- You need `stm32l0xx.h`, `startup_stm32f0xx.s`, `system_stm32f0xx.c`.
|
||||
|
||||
- `STM32L0xx_HAL_Driver` is only needed to run examples, TinyUSB stack itself doesn't rely on MCU's SDKs.
|
||||
|
||||
* Open ``Tools -> Configure Custom Argument Variables`` (Switch to `Global` tab if you want to do it for all your projects)
|
||||
Click `New Group ...`, name it to `TUSB`, Click `Add Variable ...`, name it to `TUSB_DIR`, change it's value to the path of your TinyUSB stack,
|
||||
for example `C:\\tinyusb`
|
||||
|
||||
Import stack only
|
||||
~~~~~~~~~~~~~~~~~
|
||||
|
||||
1. Open ``Project -> Add project Connection ...``, click `OK`, choose `tinyusb\\tools\\iar_template.ipcf`.
|
||||
|
||||
Run examples
|
||||
~~~~~~~~~~~~
|
||||
|
||||
1. (Python3 is needed) Run ``iar_gen.py`` to generate .ipcf files of examples:
|
||||
|
||||
.. code-block::
|
||||
|
||||
cd C:\tinyusb\tools
|
||||
python iar_gen.py
|
||||
|
||||
2. Open `Project -> Add project Connection ...`, click `OK`, choose `tinyusb\\examples\\(.ipcf of example)`.
|
||||
For example `C:\\tinyusb\\examples\\device\\cdc_msc\\iar_cdc_msc.ipcf`
|
||||
|
||||
Native CMake support (9.50.1+)
|
||||
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
|
||||
|
||||
With 9.50.1 release, IAR added experimental native CMake support (strangely not mentioned in public release note). Now it's possible to import CMakeLists.txt then build and debug as a normal project.
|
||||
|
||||
Following these steps:
|
||||
|
||||
1. Add IAR compiler binary path to system ``PATH`` environment variable, such as ``C:\Program Files\IAR Systems\Embedded Workbench 9.2\arm\bin``.
|
||||
2. Create new project in IAR, in Tool chain dropdown menu, choose CMake for Arm then Import ``CMakeLists.txt`` from chosen example directory.
|
||||
3. Set up board option in ``Option - CMake/CMSIS-TOOLBOX - CMake``, for example :code:`-DBOARD=stm32f439nucleo -DTOOLCHAIN=iar`, **Uncheck 'Override tools in env'**.
|
||||
4. (For debug only) Choose correct CPU model in ``Option - General Options - Target``, to profit register and memory view.
|
||||
85
docs/reference/index.rst
Normal file
85
docs/reference/index.rst
Normal file
@ -0,0 +1,85 @@
|
||||
*********
|
||||
Reference
|
||||
*********
|
||||
|
||||
.. figure:: ../assets/stack.svg
|
||||
:width: 1600px
|
||||
:alt: TinyUSB
|
||||
|
||||
::
|
||||
|
||||
.
|
||||
├── docs # Documentation
|
||||
├── examples # Examples with make and cmake build system
|
||||
├── hw
|
||||
│ ├── bsp # Supported boards source files
|
||||
│ └── mcu # Low level mcu core & peripheral drivers
|
||||
├── lib # Sources from 3rd party such as freeRTOS, fatfs ...
|
||||
├── src # All sources files for TinyUSB stack itself.
|
||||
├── test # Tests: unit test, fuzzing, hardware test
|
||||
└── tools # Files used internally
|
||||
|
||||
|
||||
Device Stack
|
||||
============
|
||||
|
||||
Supports multiple device configurations by dynamically changing USB descriptors, low power functions such like suspend, resume, and remote wakeup. The following device classes are supported:
|
||||
|
||||
- Audio Class 2.0 (UAC2)
|
||||
- Bluetooth Host Controller Interface (BTH HCI)
|
||||
- Communication Device Class (CDC)
|
||||
- Device Firmware Update (DFU): DFU mode (WIP) and Runtime
|
||||
- Human Interface Device (HID): Generic (In & Out), Keyboard, Mouse, Gamepad etc ...
|
||||
- Mass Storage Class (MSC): with multiple LUNs
|
||||
- Musical Instrument Digital Interface (MIDI)
|
||||
- Network with RNDIS, Ethernet Control Model (ECM), Network Control Model (NCM)
|
||||
- Test and Measurement Class (USBTMC)
|
||||
- Video class 1.5 (UVC): work in progress
|
||||
- Vendor-specific class support with generic In & Out endpoints. Can be used with MS OS 2.0 compatible descriptor to load winUSB driver without INF file.
|
||||
- `WebUSB <https://github.com/WICG/webusb>`__ with vendor-specific class
|
||||
|
||||
If you have a special requirement, `usbd_app_driver_get_cb()` can be used to write your own class driver without modifying the stack. Here is how the RPi team added their reset interface `raspberrypi/pico-sdk#197 <https://github.com/raspberrypi/pico-sdk/pull/197>`_
|
||||
|
||||
Host Stack
|
||||
==========
|
||||
|
||||
- Human Interface Device (HID): Keyboard, Mouse, Generic
|
||||
- Mass Storage Class (MSC)
|
||||
- Communication Device Class: CDC-ACM
|
||||
- Vendor serial over USB: FTDI, CP210x
|
||||
- Hub with multiple-level support
|
||||
|
||||
Similar to the Device Stack, if you have a special requirement, `usbh_app_driver_get_cb()` can be used to write your own class driver without modifying the stack.
|
||||
|
||||
TypeC PD Stack
|
||||
==============
|
||||
|
||||
- Power Delivery 3.0 (PD3.0) with USB Type-C support (WIP)
|
||||
- Super early stage, only for testing purpose
|
||||
- Only support STM32 G4
|
||||
|
||||
OS Abstraction layer
|
||||
====================
|
||||
|
||||
TinyUSB is completely thread-safe by pushing all Interrupt Service Request (ISR) events into a central queue, then processing them later in the non-ISR context task function. It also uses semaphore/mutex to access shared resources such as Communication Device Class (CDC) FIFO. Therefore the stack needs to use some of the OS's basic APIs. Following OSes are already supported out of the box.
|
||||
|
||||
- **No OS**
|
||||
- **FreeRTOS**
|
||||
- `RT-Thread <https://github.com/RT-Thread/rt-thread>`_: `repo <https://github.com/RT-Thread-packages/tinyusb>`_
|
||||
- **Mynewt** Due to the newt package build system, Mynewt examples are better to be on its `own repo <https://github.com/hathach/mynewt-tinyusb-example>`_
|
||||
|
||||
License
|
||||
=======
|
||||
|
||||
All TinyUSB sources in the `src` folder are licensed under MIT license. However, each file can be individually licensed especially those in `lib` and `hw/mcu` folder. Please make sure you understand all the license term for files you use in your project.
|
||||
|
||||
Index
|
||||
=====
|
||||
|
||||
.. toctree::
|
||||
:maxdepth: 2
|
||||
|
||||
supported
|
||||
getting_started
|
||||
dependencies
|
||||
concurrency
|
||||
440
docs/reference/supported.rst
Normal file
440
docs/reference/supported.rst
Normal file
@ -0,0 +1,440 @@
|
||||
*****************
|
||||
Supported Devices
|
||||
*****************
|
||||
|
||||
Supported MCUs
|
||||
==============
|
||||
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| Manufacturer | Family | Device | Host | Highspeed | Driver | Note |
|
||||
+==============+=======================+========+======+===========+===================+==============+
|
||||
| Allwinner | F1C100s/F1C200s | ✔ | | ✔ | sunxi | musb variant |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| Analog | MAX3421E | | ✔ | ✖ | max3421 | via SPI |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| Brigetek | FT90x | ✔ | | ✔ | ft9xx | |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| Broadcom | BCM2711, BCM2837 | ✔ | | ✔ | dwc2 | |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| Dialog | DA1469x | ✔ | ✖ | ✖ | da146xx | |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| Espressif | ESP32 S2, S3 | ✔ | | ✖ | dwc2 or esp32sx | |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| GigaDevice | GD32VF103 | ✔ | | ✖ | dwc2 | |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| Infineon | XMC4500 | ✔ | | ✖ | dwc2 | |
|
||||
+--------------+-----+-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| MicroChip | SAM | D11, D21 | ✔ | | ✖ | samd | |
|
||||
| | +-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | D51, E5x | ✔ | | ✖ | samd | |
|
||||
| | +-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | G55 | ✔ | | ✖ | samg | |
|
||||
| | +-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | L21, L22 | ✔ | | ✖ | samd | |
|
||||
| | +-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | E70,S70,V70,V71 | ✔ | | ✔ | samx7x | |
|
||||
| +-----+-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| | PIC | 24 | ✔ | | | pic | ci_fs variant|
|
||||
| | +-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | 32 mm, mk, mx | ✔ | | | pic | ci_fs variant|
|
||||
| | +-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | dsPIC33 | ✔ | | | pic | ci_fs variant|
|
||||
| | +-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | 32mz | ✔ | | | pic32mz | musb variant |
|
||||
+--------------+-----+-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| Mind Montion | mm32 | ✔ | | ✖ | mm32f327x_otg | ci_fs variant|
|
||||
+--------------+-----+-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| NordicSemi | nRF52833, nRF52840 | ✔ | ✖ | ✖ | nrf5x | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | nRF5340 | ✔ | ✖ | ✖ | nrf5x | |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| Nuvoton | NUC120 | ✔ | ✖ | ✖ | nuc120 | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | NUC121/NUC125 | ✔ | ✖ | ✖ | nuc121 | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | NUC126 | ✔ | ✖ | ✖ | nuc121 | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | NUC505 | ✔ | | ✔ | nuc505 | |
|
||||
+--------------+---------+-------------+--------+------+-----------+-------------------+--------------+
|
||||
| NXP | iMXRT | RT10xx | ✔ | ✔ | ✔ | ci_hs | |
|
||||
| | +-------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | RT11xx | ✔ | ✔ | ✔ | ci_hs | |
|
||||
| +---------+-------------+--------+------+-----------+-------------------+--------------+
|
||||
| | Kinetis | KL | ✔ | ⚠ | ✖ | ci_fs, khci | |
|
||||
| | +-------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | K32L2 | ✔ | | ✖ | khci | ci_fs variant|
|
||||
| +---------+-------------+--------+------+-----------+-------------------+--------------+
|
||||
| | LPC | 11u, 13, 15 | ✔ | ✖ | ✖ | lpc_ip3511 | |
|
||||
| | +-------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | 17, 40 | ✔ | ⚠ | ✖ | lpc17_40 | |
|
||||
| | +-------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | 18, 43 | ✔ | ✔ | ✔ | ci_hs | |
|
||||
| | +-------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | 51u | ✔ | ✖ | ✖ | lpc_ip3511 | |
|
||||
| | +-------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | 54 | ✔ | | ✔ | lpc_ip3511 | |
|
||||
| | +-------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | 55 | ✔ | | ✔ | lpc_ip3511 | |
|
||||
| +---------+-------------+--------+------+-----------+-------------------+--------------+
|
||||
| | MCX | N9 | ✔ | | ✔ | ci_fs, ci_hs | |
|
||||
+--------------+---------+-------------+--------+------+-----------+-------------------+--------------+
|
||||
| Raspberry Pi | RP2040 | ✔ | ✔ | ✖ | rp2040, pio_usb | |
|
||||
+--------------+-----+-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| Renesas | RX | 63N, 65N, 72N | ✔ | ✔ | ✖ | rusb2 | |
|
||||
| +-----+-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| | RA | 4M1, 4M3, 6M1 | ✔ | ✔ | ✖ | rusb2 | |
|
||||
| | +-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | 6M5 | ✔ | ✔ | ✔ | rusb2 | |
|
||||
+--------------+-----+-----------------+--------+------+-----------+-------------------+--------------+
|
||||
| Silabs | EFM32GG12 | ✔ | | ✖ | dwc2 | |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| Sony | CXD56 | ✔ | ✖ | ✔ | cxd56 | |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| ST STM32 | F0 | ✔ | ✖ | ✖ | stm32_fsdev | |
|
||||
| +----+------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | F1 | 102, 103 | ✔ | ✖ | ✖ | stm32_fsdev | |
|
||||
| | +------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | 105, 107 | ✔ | | ✖ | dwc2 | |
|
||||
| +----+------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | F2 | ✔ | | ✔ | dwc2 | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | F3 | ✔ | ✖ | ✖ | stm32_fsdev | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | F4 | ✔ | | ✔ | dwc2 | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | F7 | ✔ | | ✔ | dwc2 | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | H7 | ✔ | | ✔ | dwc2 | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | G4 | ✔ | ✖ | ✖ | stm32_fsdev | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | L0, L1 | ✔ | ✖ | ✖ | stm32_fsdev | |
|
||||
| +----+------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | L4 | 4x2, 4x3 | ✔ | ✖ | ✖ | stm32_fsdev | |
|
||||
| | +------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | | 4x5, 4x6 | ✔ | | | dwc2 | |
|
||||
| +----+------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | L4+ | ✔ | | | dwc2 | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | U5 | ✔ | | ✔ | dwc2 | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | WBx5 | ✔ | | | stm32_fsdev | |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| TI | MSP430 | ✔ | ✖ | ✖ | msp430x5xx | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | MSP432E4 | ✔ | | ✖ | musb | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | TM4C123 | ✔ | | ✖ | musb | |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| ValentyUSB | eptri | ✔ | ✖ | ✖ | eptri | |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| WCH | CH32V307 | ✔ | | ✔ | ch32v307 | |
|
||||
| +-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
| | CH32F20x | ✔ | | ✔ | ch32f205 | |
|
||||
+--------------+-----------------------+--------+------+-----------+-------------------+--------------+
|
||||
|
||||
|
||||
Table Legend
|
||||
------------
|
||||
|
||||
= ===================
|
||||
✔ Supported
|
||||
⚠ WIP/partial support
|
||||
✖ Not supported
|
||||
= ===================
|
||||
|
||||
Supported Boards
|
||||
================
|
||||
|
||||
The board support code is only used for self-contained examples and testing. It is not used when TinyUSB is part of a larger project. It is responsible for getting the MCU started and the USB peripheral clocked with minimal of on-board devices
|
||||
|
||||
- One LED : for status
|
||||
- One Button : to get input from user
|
||||
- One UART : optional for device, but required for host examples
|
||||
|
||||
The following boards are supported (sorted alphabetically):
|
||||
|
||||
Broadcom
|
||||
--------
|
||||
|
||||
- `Raspberry Pi CM4 <https://www.raspberrypi.com/products/compute-module-4>`__
|
||||
|
||||
Dialog DA146xx
|
||||
--------------
|
||||
|
||||
- `DA14695 Development Kit – USB <https://www.dialog-semiconductor.com/products/da14695-development-kit-usb>`__
|
||||
- `DA1469x Development Kit – Pro <https://www.dialog-semiconductor.com/products/da14695-development-kit-pro>`__
|
||||
|
||||
Espressif ESP32-S2
|
||||
------------------
|
||||
|
||||
- `Adafruit Feather ESP32-S2 <https://www.adafruit.com/product/5000>`__
|
||||
- `Adafruit Magtag 2.9" E-Ink WiFi Display <https://www.adafruit.com/product/4800>`__
|
||||
- `Adafruit Metro ESP32-S2 <https://www.adafruit.com/product/4775>`__
|
||||
- `ESP32-S2-Kaluga-1 <https://docs.espressif.com/projects/esp-idf/en/latest/esp32s2/hw-reference/esp32s2/user-guide-esp32-s2-kaluga-1-kit.html>`__
|
||||
- `ESP32-S2-Saola-1 <https://docs.espressif.com/projects/esp-idf/en/latest/esp32s2/hw-reference/esp32s2/user-guide-saola-1-v1.2.html>`__
|
||||
|
||||
GigaDevice
|
||||
----------
|
||||
|
||||
- `Sipeed Longan Nano <https://longan.sipeed.com/en/>`__
|
||||
|
||||
Infineon
|
||||
---------
|
||||
|
||||
XMC4000
|
||||
^^^^^^^
|
||||
|
||||
- `XMC4500 Relax (Lite) Kit <https://www.infineon.com/cms/en/product/evaluation-boards/kit_xmc45_relax_lite_v1/>`__
|
||||
|
||||
MicroChip
|
||||
---------
|
||||
|
||||
SAMD11 & SAMD21
|
||||
^^^^^^^^^^^^^^^
|
||||
|
||||
- `Adafruit Circuit Playground Express <https://www.adafruit.com/product/3333>`__
|
||||
- `Adafruit Feather M0 Express <https://www.adafruit.com/product/3403>`__
|
||||
- `Adafruit ItsyBitsy M0 Express <https://www.adafruit.com/product/3727>`__
|
||||
- `Adafruit Metro M0 Express <https://www.adafruit.com/product/3505>`__
|
||||
- `Great Scott Gadgets Cynthion <https://greatscottgadgets.com/cynthion/>`__
|
||||
- `Microchip SAMD11 Xplained Pro <https://www.microchip.com/developmenttools/ProductDetails/atsamd11-xpro>`__
|
||||
- `Microchip SAMD21 Xplained Pro <https://www.microchip.com/DevelopmentTools/ProductDetails/ATSAMD21-XPRO>`__
|
||||
- `Seeeduino Xiao <https://www.seeedstudio.com/Seeeduino-XIAO-Arduino-Microcontroller-SAMD21-Cortex-M0+-p-4426.html>`__
|
||||
|
||||
SAMD51 & SAME54
|
||||
^^^^^^^^^^^^^^^
|
||||
|
||||
- `Adafruit Feather M4 Express <https://www.adafruit.com/product/3857>`__
|
||||
- `Adafruit ItsyBitsy M4 Express <https://www.adafruit.com/product/3800>`__
|
||||
- `Adafruit PyBadge <https://www.adafruit.com/product/4200>`__
|
||||
- `Adafruit PyPortal <https://www.adafruit.com/product/4116>`__
|
||||
- `Adafruit Metro M4 Express <https://www.adafruit.com/product/3382>`__
|
||||
- `D5035-01 <https://github.com/RudolphRiedel/USB_CAN-FD>`__
|
||||
- `Microchip SAME54 Xplained Pro <https://www.microchip.com/developmenttools/productdetails/atsame54-xpro>`__
|
||||
|
||||
SAME7x
|
||||
^^^^^^
|
||||
|
||||
- `Microchip SAME70 Xplained <https://www.microchip.com/en-us/development-tool/ATSAME70-XPLD>`_
|
||||
- `QMTECH ATSAME70N19 <https://www.aliexpress.com/item/1005003173783268.html>`_
|
||||
|
||||
SAMG
|
||||
^^^^
|
||||
|
||||
- `Microchip SAMG55 Xplained Pro <https://www.microchip.com/DevelopmentTools/ProductDetails/PartNO/ATSAMG55-XPRO>`__
|
||||
|
||||
SAML2x
|
||||
^^^^^^
|
||||
|
||||
- `SAML21 Xplaind Pro <https://www.microchip.com/DevelopmentTools/ProductDetails/ATSAML21-XPRO-B>`__
|
||||
- `SAML22 Feather <https://github.com/joeycastillo/Feather-Projects/tree/main/SAML22%20Feather>`__
|
||||
- `Sensor Watch <https://github.com/joeycastillo/Sensor-Watch>`__
|
||||
|
||||
Nordic nRF5x
|
||||
------------
|
||||
|
||||
- `Adafruit Circuit Playground Bluefruit <https://www.adafruit.com/product/4333>`__
|
||||
- `Adafruit CLUE <https://www.adafruit.com/product/4500>`__
|
||||
- `Adafruit Feather nRF52840 Express <https://www.adafruit.com/product/4062>`__
|
||||
- `Adafruit Feather nRF52840 Sense <https://www.adafruit.com/product/4516>`__
|
||||
- `Adafruit ItsyBitsy nRF52840 Express <https://www.adafruit.com/product/4481>`__
|
||||
- `Arduino Nano 33 BLE <https://store.arduino.cc/usa/nano-33-ble>`__
|
||||
- `Arduino Nano 33 BLE Sense <https://store.arduino.cc/usa/nano-33-ble-sense>`__
|
||||
- `Maker Diary nRF52840 MDK Dongle <https://wiki.makerdiary.com/nrf52840-mdk-usb-dongle>`__
|
||||
- `Nordic nRF52840 Development Kit (aka pca10056) <https://www.nordicsemi.com/Software-and-Tools/Development-Kits/nRF52840-DK>`__
|
||||
- `Nordic nRF52840 Dongle (aka pca10059) <https://www.nordicsemi.com/Software-and-Tools/Development-Kits/nRF52840-Dongle>`__
|
||||
- `Nordic nRF52833 Development Kit (aka pca10100) <https://www.nordicsemi.com/Software-and-Tools/Development-Kits/nRF52833-DK>`__
|
||||
- `Raytac MDBT50Q-RX Dongle <https://www.raytac.com/product/ins.php?index_id=89>`__
|
||||
|
||||
Nuvoton
|
||||
-------
|
||||
|
||||
- NuTiny SDK NUC120
|
||||
- `NuTiny NUC121S <https://direct.nuvoton.com/en/nutiny-nuc121s>`__
|
||||
- `NuTiny NUC125S <https://direct.nuvoton.com/en/nutiny-nuc125s>`__
|
||||
- `NuTiny NUC126V <https://direct.nuvoton.com/en/nutiny-nuc126v>`__
|
||||
- `NuTiny SDK NUC505Y <https://direct.nuvoton.com/en/nutiny-nuc505y>`__
|
||||
|
||||
NXP
|
||||
---
|
||||
|
||||
iMX RT
|
||||
^^^^^^
|
||||
|
||||
- `MIMX RT1010 Evaluation Kit <https://www.nxp.com/design/development-boards/i.mx-evaluation-and-development-boards/i.mx-rt1010-evaluation-kit:MIMXRT1010-EVK>`__
|
||||
- `MIMX RT1015 Evaluation Kit <https://www.nxp.com/design/development-boards/i.mx-evaluation-and-development-boards/i.mx-rt1015-evaluation-kit:MIMXRT1015-EVK>`__
|
||||
- `MIMX RT1020 Evaluation Kit <https://www.nxp.com/design/development-boards/i.mx-evaluation-and-development-boards/i.mx-rt1020-evaluation-kit:MIMXRT1020-EVK>`__
|
||||
- `MIMX RT1050 Evaluation Kit <https://www.nxp.com/design/development-boards/i.mx-evaluation-and-development-boards/i.mx-rt1050-evaluation-kit:MIMXRT1050-EVK>`__
|
||||
- `MIMX RT1060 Evaluation Kit <https://www.nxp.com/design/development-boards/i.mx-evaluation-and-development-boards/mimxrt1060-evk-i.mx-rt1060-evaluation-kit:MIMXRT1060-EVK>`__
|
||||
- `MIMX RT1064 Evaluation Kit <https://www.nxp.com/design/development-boards/i.mx-evaluation-and-development-boards/mimxrt1064-evk-i.mx-rt1064-evaluation-kit:MIMXRT1064-EVK>`__
|
||||
- `Teensy 4.0 Development Board <https://www.pjrc.com/store/teensy40.html>`__
|
||||
- `Teensy 4.1 Development Board <https://www.pjrc.com/store/teensy41.html>`__
|
||||
|
||||
Kinetis
|
||||
^^^^^^^
|
||||
|
||||
- `Freedom FRDM-KL25Z <https://www.nxp.com/design/development-boards/freedom-development-boards/mcu-boards/freedom-development-platform-for-kinetis-kl14-kl15-kl24-kl25-mcus:FRDM-KL25Z>`__
|
||||
- `Freedom FRDM-K32L2A4S <https://www.nxp.com/design/development-boards/freedom-development-boards/mcu-boards/nxp-freedom-platform-for-k32-l2a-mcus:FRDM-K32L2A4S>`__
|
||||
- `Freedom FRDM-K32L2B3 <https://www.nxp.com/design/development-boards/freedom-development-boards/mcu-boards/nxp-freedom-development-platform-for-k32-l2b-mcus:FRDM-K32L2B3>`__
|
||||
- `KUIIC <https://github.com/nxf58843/kuiic>`__
|
||||
|
||||
LPC 11-13-15
|
||||
^^^^^^^^^^^^
|
||||
|
||||
- `LPCXpresso 11u37 <https://www.nxp.com/design/microcontrollers-developer-resources/lpcxpresso-boards/lpcxpresso-board-for-lpc11u37h:OM13074>`__
|
||||
- `LPCXpresso 11u68 <https://www.nxp.com/support/developer-resources/evaluation-and-development-boards/lpcxpresso-boards/lpcxpresso-board-for-lpc11u68:OM13058>`__
|
||||
- `LPCXpresso 1347 <https://www.nxp.com/support/developer-resources/evaluation-and-development-boards/lpcxpresso-boards/lpcxpresso-board-for-lpc1347:OM13045>`__
|
||||
- `LPCXpresso 1549 <https://www.nxp.com/products/processors-and-microcontrollers/arm-microcontrollers/general-purpose-mcus/lpc1500-cortex-m3/lpcxpresso-board-for-lpc1549:OM13056>`__
|
||||
|
||||
LPC 17-40
|
||||
^^^^^^^^^
|
||||
|
||||
- `ARM mbed LPC1768 <https://www.nxp.com/products/processors-and-microcontrollers/arm-microcontrollers/general-purpose-mcus/lpc1700-cortex-m3/arm-mbed-lpc1768-board:OM11043>`__
|
||||
- `Embedded Artists LPC4088 Quick Start board <https://www.embeddedartists.com/products/lpc4088-quickstart-board>`__
|
||||
- `LPCXpresso 1769 <https://www.nxp.com/support/developer-resources/evaluation-and-development-boards/lpcxpresso-boards/lpcxpresso-board-for-lpc1769:OM13000>`__
|
||||
|
||||
LPC 18-43
|
||||
^^^^^^^^^
|
||||
|
||||
- `Embedded Artists LPC4357 Developer Kit <http://www.embeddedartists.com/products/kits/lpc4357_kit.php>`__
|
||||
- `Keil MCB1800 Evaluation Board <http://www.keil.com/mcb1800>`__
|
||||
- `LPCXpresso18S37 Development Board <https://www.nxp.com/products/processors-and-microcontrollers/arm-microcontrollers/general-purpose-mcus/lpc4000-cortex-m4/lpcxpresso18s37-development-board:OM13076>`__
|
||||
|
||||
LPC 51
|
||||
^^^^^^
|
||||
|
||||
- `LPCXpresso 51U68 <https://www.nxp.com/products/processors-and-microcontrollers/arm-microcontrollers/general-purpose-mcus/lpcxpresso51u68-for-the-lpc51u68-mcus:OM40005>`__
|
||||
|
||||
LPC 54
|
||||
^^^^^^
|
||||
|
||||
- `LPCXpresso 54114 <https://www.nxp.com/design/microcontrollers-developer-resources/lpcxpresso-boards/lpcxpresso54114-board:OM13089>`__
|
||||
|
||||
LPC55
|
||||
^^^^^
|
||||
|
||||
- `Double M33 Express <https://www.crowdsupply.com/steiert-solutions/double-m33-express>`__
|
||||
- `LPCXpresso 55s28 EVK <https://www.nxp.com/design/software/development-software/lpcxpresso55s28-development-board:LPC55S28-EVK>`__
|
||||
- `LPCXpresso 55s69 EVK <https://www.nxp.com/design/development-boards/lpcxpresso-boards/lpcxpresso55s69-development-board:LPC55S69-EVK>`__
|
||||
- `MCU-Link <https://www.nxp.com/design/development-boards/lpcxpresso-boards/mcu-link-debug-probe:MCU-LINK>`__
|
||||
|
||||
Renesas
|
||||
-------
|
||||
|
||||
RA
|
||||
^^
|
||||
|
||||
- `Evaluation Kit for RA4M1 <https://www.renesas.com/us/en/products/microcontrollers-microprocessors/ra-cortex-m-mcus/ek-ra4m1-evaluation-kit-ra4m1-mcu-group>`__
|
||||
- `Evaluation Kit for RA4M3 <https://www.renesas.com/us/en/products/microcontrollers-microprocessors/ra-cortex-m-mcus/ek-ra4m3-evaluation-kit-ra4m3-mcu-group>`__
|
||||
|
||||
RX
|
||||
^^
|
||||
|
||||
- `GR-CITRUS <https://www.renesas.com/us/en/products/gadget-renesas/boards/gr-citrus>`__
|
||||
- `Renesas RX65N Target Board <https://www.renesas.com/us/en/products/microcontrollers-microprocessors/rx-32-bit-performance-efficiency-mcus/rtk5rx65n0c00000br-target-board-rx65n>`__
|
||||
|
||||
Raspberry Pi RP2040
|
||||
-------------------
|
||||
|
||||
- `Adafruit Feather RP2040 <https://www.adafruit.com/product/4884>`__
|
||||
- `Adafruit ItsyBitsy RP2040 <https://www.adafruit.com/product/4888>`__
|
||||
- `Adafruit QT Py RP2040 <https://www.adafruit.com/product/4900>`__
|
||||
- `Raspberry Pi Pico <https://www.raspberrypi.org/products/raspberry-pi-pico/>`__
|
||||
|
||||
Silabs
|
||||
------
|
||||
|
||||
- `EFM32GG12 Thunderboard Kit (SLTB009A) <https://www.silabs.com/development-tools/thunderboard/thunderboard-gg12-kit>`__
|
||||
|
||||
Sony
|
||||
----
|
||||
|
||||
- `Sony Spresense CXD5602 <https://developer.sony.com/develop/spresense>`__
|
||||
|
||||
ST STM32
|
||||
--------
|
||||
|
||||
F0
|
||||
^^
|
||||
- `STM32 F070rb Nucleo <https://www.st.com/en/evaluation-tools/nucleo-f070rb.html>`__
|
||||
- `STM32 F072 Evaluation <https://www.st.com/en/evaluation-tools/stm32072b-eval.html>`__
|
||||
- `STM32 F072rb Discovery <https://www.st.com/en/evaluation-tools/32f072bdiscovery.html>`__
|
||||
|
||||
F1
|
||||
^^
|
||||
- `STM32 F103c8 Blue Pill <https://stm32-base.org/boards/STM32F103C8T6-Blue-Pill>`__
|
||||
- `STM32 F103rc Mini v2.0 <https://stm32-base.org/boards/STM32F103RCT6-STM32-Mini-V2.0>`__
|
||||
|
||||
F2
|
||||
^^
|
||||
- `STM32 F207zg Nucleo <https://www.st.com/en/evaluation-tools/nucleo-f207zg.html>`__
|
||||
|
||||
F3
|
||||
^^
|
||||
- `STM32 F303vc Discovery <https://www.st.com/en/evaluation-tools/stm32f3discovery.html>`__
|
||||
|
||||
F4
|
||||
^^
|
||||
- `Adafruit Feather STM32F405 <https://www.adafruit.com/product/4382>`__
|
||||
- `Micro Python PyBoard v1.1 <https://store.micropython.org/product/PYBv1.1>`__
|
||||
- `STM32 F401cc Black Pill <https://stm32-base.org/boards/STM32F401CCU6-WeAct-Black-Pill-V1.2>`__
|
||||
- `STM32 F407vg Discovery <https://www.st.com/en/evaluation-tools/stm32f4discovery.html>`__
|
||||
- `STM32 F411ce Black Pill <https://www.adafruit.com/product/4877>`__
|
||||
- `STM32 F411ve Discovery <https://www.st.com/en/evaluation-tools/32f411ediscovery.html>`__
|
||||
- `STM32 F412zg Discovery <https://www.st.com/en/evaluation-tools/32f412gdiscovery.html>`__
|
||||
- `STM32 F412zg Nucleo <https://www.st.com/en/evaluation-tools/nucleo-f412zg.html>`__
|
||||
- `STM32 F439zi Nucleo <https://www.st.com/en/evaluation-tools/nucleo-f439zi.html>`__
|
||||
|
||||
F7
|
||||
^^
|
||||
|
||||
- `STLink-V3 Mini <https://www.st.com/en/development-tools/stlink-v3mini.html>`__
|
||||
- `STM32 F723e Discovery <https://www.st.com/en/evaluation-tools/32f723ediscovery.html>`__
|
||||
- `STM32 F746zg Nucleo <https://www.st.com/en/evaluation-tools/nucleo-f746zg.html>`__
|
||||
- `STM32 F746g Discovery <https://www.st.com/en/evaluation-tools/32f746gdiscovery.html>`__
|
||||
- `STM32 F767zi Nucleo <https://www.st.com/en/evaluation-tools/nucleo-f767zi.html>`__
|
||||
- `STM32 F769i Discovery <https://www.st.com/en/evaluation-tools/32f769idiscovery.html>`__
|
||||
|
||||
H7
|
||||
^^
|
||||
- `STM32 H743zi Nucleo <https://www.st.com/en/evaluation-tools/nucleo-h743zi.html>`__
|
||||
- `STM32 H743i Evaluation <https://www.st.com/en/evaluation-tools/stm32h743i-eval.html>`__
|
||||
- `STM32 H745i Discovery <https://www.st.com/en/evaluation-tools/stm32h745i-disco.html>`__
|
||||
- `Waveshare OpenH743I-C <https://www.waveshare.com/openh743i-c-standard.htm>`__
|
||||
|
||||
G4
|
||||
^^
|
||||
- `STM32 G474RE Nucleo <https://www.st.com/en/evaluation-tools/nucleo-g474re.html>`__
|
||||
|
||||
L0
|
||||
^^
|
||||
- `STM32 L035c8 Discovery <https://www.st.com/en/evaluation-tools/32l0538discovery.html>`__
|
||||
|
||||
L4
|
||||
^^
|
||||
- `STM32 L476vg Discovery <https://www.st.com/en/evaluation-tools/32l476gdiscovery.html>`__
|
||||
- `STM32 L4P5zg Nucleo <https://www.st.com/en/evaluation-tools/nucleo-l4p5zg.html>`__
|
||||
- `STM32 L4R5zi Nucleo <https://www.st.com/en/evaluation-tools/nucleo-l4r5zi.html>`__
|
||||
|
||||
WB
|
||||
^^
|
||||
- `STM32 WB55 Nucleo <https://www.st.com/en/evaluation-tools/p-nucleo-wb55.html>`__
|
||||
|
||||
TI
|
||||
--
|
||||
|
||||
- `MSP430F5529 USB LaunchPad Evaluation Kit <http://www.ti.com/tool/MSP-EXP430F5529LP>`__
|
||||
- `MSP-EXP432E401Y LaunchPad Evaluation Kit <https://www.ti.com/tool/MSP-EXP432E401Y>`__
|
||||
- `TM4C123GXL LaunchPad Evaluation Kit <https://www.ti.com/tool/EK-TM4C123GXL>`__
|
||||
|
||||
Tomu
|
||||
----
|
||||
|
||||
- `Fomu <https://www.crowdsupply.com/sutajio-kosagi/fomu>`__
|
||||
|
||||
WCH
|
||||
---
|
||||
|
||||
- `CH32V307V-R1-1v0 <https://lcsc.com/product-detail/Development-Boards-Kits_WCH-Jiangsu-Qin-Heng-CH32V307V-EVT-R1_C2943980.html>`__
|
||||
- `CH32F205R-R0-1v0 <https://github.com/openwch/ch32f20x/blob/main/EVT/PUB/CH32F20x%20Evaluation%20Board%20Reference-EN.pdf>`__
|
||||
4
docs/requirements.txt
Normal file
4
docs/requirements.txt
Normal file
@ -0,0 +1,4 @@
|
||||
sphinx>=5.0
|
||||
furo>=2020.12.30.b24
|
||||
sphinx-autodoc-typehints>=1.10
|
||||
jinja2>=3.0.3
|
||||
11
examples/CMakeLists.txt
Normal file
11
examples/CMakeLists.txt
Normal file
@ -0,0 +1,11 @@
|
||||
cmake_minimum_required(VERSION 3.17)
|
||||
|
||||
#set(CMAKE_EXPORT_COMPILE_COMMANDS ON)
|
||||
include(${CMAKE_CURRENT_SOURCE_DIR}/../hw/bsp/family_support.cmake)
|
||||
|
||||
project(tinyusb_examples C CXX ASM)
|
||||
|
||||
add_subdirectory(device)
|
||||
add_subdirectory(dual)
|
||||
add_subdirectory(host)
|
||||
add_subdirectory(typec)
|
||||
21
examples/build_system/cmake/cpu/arm1176jzf-s.cmake
Normal file
21
examples/build_system/cmake/cpu/arm1176jzf-s.cmake
Normal file
@ -0,0 +1,21 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
-mcpu=arm1176jzf-s
|
||||
-ffreestanding
|
||||
)
|
||||
# set(FREERTOS_PORT GCC_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--target=arm-none-eabi
|
||||
-mcpu=arm1176jzf-s
|
||||
-mfpu=none
|
||||
-mfloat-abi=soft
|
||||
-ffreestanding
|
||||
)
|
||||
#set(FREERTOS_PORT GCC_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
message(FATAL_ERROR "IAR not supported")
|
||||
|
||||
endif ()
|
||||
21
examples/build_system/cmake/cpu/arm926ej-s.cmake
Normal file
21
examples/build_system/cmake/cpu/arm926ej-s.cmake
Normal file
@ -0,0 +1,21 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
-mcpu=arm926ej-s
|
||||
-ffreestanding
|
||||
)
|
||||
# set(FREERTOS_PORT GCC_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--target=arm-none-eabi
|
||||
-mcpu=arm926ej-s
|
||||
-mfpu=none
|
||||
-mfloat-abi=soft
|
||||
-ffreestanding
|
||||
)
|
||||
#set(FREERTOS_PORT GCC_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
message(FATAL_ERROR "IAR not supported")
|
||||
|
||||
endif ()
|
||||
17
examples/build_system/cmake/cpu/cortex-a53.cmake
Normal file
17
examples/build_system/cmake/cpu/cortex-a53.cmake
Normal file
@ -0,0 +1,17 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
-mcpu=cortex-a53
|
||||
)
|
||||
# set(FREERTOS_PORT GCC_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--target=arm-none-eabi
|
||||
-mcpu=cortex-a53
|
||||
)
|
||||
#set(FREERTOS_PORT GCC_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
message(FATAL_ERROR "IAR not supported")
|
||||
|
||||
endif ()
|
||||
17
examples/build_system/cmake/cpu/cortex-a72.cmake
Normal file
17
examples/build_system/cmake/cpu/cortex-a72.cmake
Normal file
@ -0,0 +1,17 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
-mcpu=cortex-a72
|
||||
)
|
||||
# set(FREERTOS_PORT GCC_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--target=arm-none-eabi
|
||||
-mcpu=cortex-a72
|
||||
)
|
||||
#set(FREERTOS_PORT GCC_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
message(FATAL_ERROR "IAR not supported")
|
||||
|
||||
endif ()
|
||||
22
examples/build_system/cmake/cpu/cortex-m0.cmake
Normal file
22
examples/build_system/cmake/cpu/cortex-m0.cmake
Normal file
@ -0,0 +1,22 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
-mthumb
|
||||
-mcpu=cortex-m0plus
|
||||
-mfloat-abi=soft
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--target=arm-none-eabi
|
||||
-mcpu=cortex-m0
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--cpu cortex-m0
|
||||
)
|
||||
set(FREERTOS_PORT IAR_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
endif ()
|
||||
22
examples/build_system/cmake/cpu/cortex-m0plus.cmake
Normal file
22
examples/build_system/cmake/cpu/cortex-m0plus.cmake
Normal file
@ -0,0 +1,22 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
-mthumb
|
||||
-mcpu=cortex-m0plus
|
||||
-mfloat-abi=soft
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--target=arm-none-eabi
|
||||
-mcpu=cortex-m0plus
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--cpu cortex-m0
|
||||
)
|
||||
set(FREERTOS_PORT IAR_ARM_CM0 CACHE INTERNAL "")
|
||||
|
||||
endif ()
|
||||
22
examples/build_system/cmake/cpu/cortex-m23.cmake
Normal file
22
examples/build_system/cmake/cpu/cortex-m23.cmake
Normal file
@ -0,0 +1,22 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
-mthumb
|
||||
-mcpu=cortex-m23
|
||||
-mfloat-abi=soft
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM23_NTZ_NONSECURE CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--target=arm-none-eabi
|
||||
-mcpu=cortex-m23
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM23_NTZ_NONSECURE CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--cpu cortex-m23
|
||||
)
|
||||
set(FREERTOS_PORT IAR_ARM_CM23_NTZ_NONSECURE CACHE INTERNAL "")
|
||||
|
||||
endif ()
|
||||
21
examples/build_system/cmake/cpu/cortex-m3.cmake
Normal file
21
examples/build_system/cmake/cpu/cortex-m3.cmake
Normal file
@ -0,0 +1,21 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
-mthumb
|
||||
-mcpu=cortex-m3
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM3 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--target=arm-none-eabi
|
||||
-mcpu=cortex-m3
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM3 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--cpu cortex-m3
|
||||
)
|
||||
set(FREERTOS_PORT IAR_ARM_CM3 CACHE INTERNAL "")
|
||||
|
||||
endif ()
|
||||
18
examples/build_system/cmake/cpu/cortex-m33-nodsp-nofp.cmake
Normal file
18
examples/build_system/cmake/cpu/cortex-m33-nodsp-nofp.cmake
Normal file
@ -0,0 +1,18 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
-mthumb
|
||||
-mcpu=cortex-m33+nodsp
|
||||
-mfloat-abi=soft
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM33_NTZ_NONSECURE CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
message(FATAL_ERROR "Clang is not supported for this target")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--cpu cortex-m33+nodsp
|
||||
)
|
||||
set(FREERTOS_PORT IAR_ARM_CM33_NTZ_NONSECURE CACHE INTERNAL "")
|
||||
|
||||
endif ()
|
||||
25
examples/build_system/cmake/cpu/cortex-m33.cmake
Normal file
25
examples/build_system/cmake/cpu/cortex-m33.cmake
Normal file
@ -0,0 +1,25 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
-mthumb
|
||||
-mcpu=cortex-m33
|
||||
-mfloat-abi=hard
|
||||
-mfpu=fpv5-sp-d16
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM33_NTZ_NONSECURE CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--target=arm-none-eabi
|
||||
-mcpu=cortex-m33
|
||||
-mfpu=fpv5-sp-d16
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM33_NTZ_NONSECURE CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--cpu cortex-m33
|
||||
--fpu VFPv5-SP
|
||||
)
|
||||
set(FREERTOS_PORT IAR_ARM_CM33_NTZ_NONSECURE CACHE INTERNAL "")
|
||||
|
||||
endif ()
|
||||
32
examples/build_system/cmake/cpu/cortex-m4.cmake
Normal file
32
examples/build_system/cmake/cpu/cortex-m4.cmake
Normal file
@ -0,0 +1,32 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
-mthumb
|
||||
-mcpu=cortex-m4
|
||||
-mfloat-abi=hard
|
||||
-mfpu=fpv4-sp-d16
|
||||
)
|
||||
if (NOT DEFINED FREERTOS_PORT)
|
||||
set(FREERTOS_PORT GCC_ARM_CM4F CACHE INTERNAL "")
|
||||
endif ()
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--target=arm-none-eabi
|
||||
-mcpu=cortex-m4
|
||||
-mfpu=fpv4-sp-d16
|
||||
)
|
||||
if (NOT DEFINED FREERTOS_PORT)
|
||||
set(FREERTOS_PORT GCC_ARM_CM4F CACHE INTERNAL "")
|
||||
endif ()
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--cpu cortex-m4
|
||||
--fpu VFPv4_sp
|
||||
)
|
||||
|
||||
if (NOT DEFINED FREERTOS_PORT)
|
||||
set(FREERTOS_PORT IAR_ARM_CM4F CACHE INTERNAL "")
|
||||
endif ()
|
||||
|
||||
endif ()
|
||||
25
examples/build_system/cmake/cpu/cortex-m7-fpsp.cmake
Normal file
25
examples/build_system/cmake/cpu/cortex-m7-fpsp.cmake
Normal file
@ -0,0 +1,25 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
-mthumb
|
||||
-mcpu=cortex-m7
|
||||
-mfloat-abi=hard
|
||||
-mfpu=fpv5-sp-d16
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM7 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--target=arm-none-eabi
|
||||
-mcpu=cortex-m7
|
||||
-mfpu=fpv5-sp-d16
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM7 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--cpu cortex-m7
|
||||
--fpu VFPv5_sp
|
||||
)
|
||||
set(FREERTOS_PORT IAR_ARM_CM7 CACHE INTERNAL "")
|
||||
|
||||
endif ()
|
||||
25
examples/build_system/cmake/cpu/cortex-m7.cmake
Normal file
25
examples/build_system/cmake/cpu/cortex-m7.cmake
Normal file
@ -0,0 +1,25 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
-mthumb
|
||||
-mcpu=cortex-m7
|
||||
-mfloat-abi=hard
|
||||
-mfpu=fpv5-d16
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM7 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--target=arm-none-eabi
|
||||
-mcpu=cortex-m7
|
||||
-mfpu=fpv5-d16
|
||||
)
|
||||
set(FREERTOS_PORT GCC_ARM_CM7 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
set(TOOLCHAIN_COMMON_FLAGS
|
||||
--cpu cortex-m7
|
||||
--fpu VFPv5_D16
|
||||
)
|
||||
set(FREERTOS_PORT IAR_ARM_CM7 CACHE INTERNAL "")
|
||||
|
||||
endif ()
|
||||
10
examples/build_system/cmake/cpu/msp430.cmake
Normal file
10
examples/build_system/cmake/cpu/msp430.cmake
Normal file
@ -0,0 +1,10 @@
|
||||
if (TOOLCHAIN STREQUAL "gcc")
|
||||
set(FREERTOS_PORT GCC_MSP430F449 CACHE INTERNAL "")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "clang")
|
||||
message(FATAL_ERROR "Clang is not supported for this target")
|
||||
|
||||
elseif (TOOLCHAIN STREQUAL "iar")
|
||||
set(FREERTOS_PORT IAR_MSP430 CACHE INTERNAL "")
|
||||
|
||||
endif ()
|
||||
21
examples/build_system/cmake/toolchain/aarch64_gcc.cmake
Normal file
21
examples/build_system/cmake/toolchain/aarch64_gcc.cmake
Normal file
@ -0,0 +1,21 @@
|
||||
if (NOT DEFINED CMAKE_C_COMPILER)
|
||||
set(CMAKE_C_COMPILER "aarch64-none-elf-gcc")
|
||||
endif ()
|
||||
|
||||
if (NOT DEFINED CMAKE_CXX_COMPILER)
|
||||
set(CMAKE_CXX_COMPILER "aarch64-none-elf-g++")
|
||||
endif ()
|
||||
|
||||
set(CMAKE_ASM_COMPILER ${CMAKE_C_COMPILER})
|
||||
set(CMAKE_SIZE "aarch64-none-elf-size" CACHE FILEPATH "")
|
||||
set(CMAKE_OBJCOPY "aarch64-none-elf-objcopy" CACHE FILEPATH "")
|
||||
set(CMAKE_OBJDUMP "aarch64-none-elf-objdump" CACHE FILEPATH "")
|
||||
|
||||
include(${CMAKE_CURRENT_LIST_DIR}/common.cmake)
|
||||
|
||||
get_property(IS_IN_TRY_COMPILE GLOBAL PROPERTY IN_TRY_COMPILE)
|
||||
if (IS_IN_TRY_COMPILE)
|
||||
set(CMAKE_C_LINK_FLAGS "${CMAKE_C_LINK_FLAGS} -nostdlib")
|
||||
set(CMAKE_CXX_LINK_FLAGS "${CMAKE_CXX_LINK_FLAGS} -nostdlib")
|
||||
cmake_print_variables(CMAKE_C_LINK_FLAGS)
|
||||
endif ()
|
||||
21
examples/build_system/cmake/toolchain/arm_clang.cmake
Normal file
21
examples/build_system/cmake/toolchain/arm_clang.cmake
Normal file
@ -0,0 +1,21 @@
|
||||
if (NOT DEFINED CMAKE_C_COMPILER)
|
||||
set(CMAKE_C_COMPILER "clang")
|
||||
endif ()
|
||||
|
||||
if (NOT DEFINED CMAKE_CXX_COMPILER)
|
||||
set(CMAKE_CXX_COMPILER "clang++")
|
||||
endif ()
|
||||
|
||||
set(CMAKE_ASM_COMPILER ${CMAKE_C_COMPILER})
|
||||
set(CMAKE_SIZE "llvm-size" CACHE FILEPATH "")
|
||||
set(CMAKE_OBJCOPY "llvm-objcopy" CACHE FILEPATH "")
|
||||
set(CMAKE_OBJDUMP "llvm-objdump" CACHE FILEPATH "")
|
||||
|
||||
include(${CMAKE_CURRENT_LIST_DIR}/common.cmake)
|
||||
|
||||
get_property(IS_IN_TRY_COMPILE GLOBAL PROPERTY IN_TRY_COMPILE)
|
||||
if (IS_IN_TRY_COMPILE)
|
||||
set(CMAKE_C_LINK_FLAGS "${CMAKE_C_LINK_FLAGS} -nostdlib")
|
||||
set(CMAKE_CXX_LINK_FLAGS "${CMAKE_CXX_LINK_FLAGS} -nostdlib")
|
||||
cmake_print_variables(CMAKE_C_LINK_FLAGS)
|
||||
endif ()
|
||||
21
examples/build_system/cmake/toolchain/arm_gcc.cmake
Normal file
21
examples/build_system/cmake/toolchain/arm_gcc.cmake
Normal file
@ -0,0 +1,21 @@
|
||||
if (NOT DEFINED CMAKE_C_COMPILER)
|
||||
set(CMAKE_C_COMPILER "arm-none-eabi-gcc")
|
||||
endif ()
|
||||
|
||||
if (NOT DEFINED CMAKE_CXX_COMPILER)
|
||||
set(CMAKE_CXX_COMPILER "arm-none-eabi-g++")
|
||||
endif ()
|
||||
|
||||
set(CMAKE_ASM_COMPILER ${CMAKE_C_COMPILER})
|
||||
set(CMAKE_SIZE "arm-none-eabi-size" CACHE FILEPATH "")
|
||||
set(CMAKE_OBJCOPY "arm-none-eabi-objcopy" CACHE FILEPATH "")
|
||||
set(CMAKE_OBJDUMP "arm-none-eabi-objdump" CACHE FILEPATH "")
|
||||
|
||||
include(${CMAKE_CURRENT_LIST_DIR}/common.cmake)
|
||||
|
||||
get_property(IS_IN_TRY_COMPILE GLOBAL PROPERTY IN_TRY_COMPILE)
|
||||
if (IS_IN_TRY_COMPILE)
|
||||
set(CMAKE_C_LINK_FLAGS "${CMAKE_C_LINK_FLAGS} -nostdlib")
|
||||
set(CMAKE_CXX_LINK_FLAGS "${CMAKE_CXX_LINK_FLAGS} -nostdlib")
|
||||
cmake_print_variables(CMAKE_C_LINK_FLAGS)
|
||||
endif ()
|
||||
17
examples/build_system/cmake/toolchain/arm_iar.cmake
Normal file
17
examples/build_system/cmake/toolchain/arm_iar.cmake
Normal file
@ -0,0 +1,17 @@
|
||||
if (NOT DEFINED CMAKE_C_COMPILER)
|
||||
set(CMAKE_C_COMPILER "iccarm")
|
||||
endif()
|
||||
|
||||
if (NOT DEFINED CMAKE_CXX_COMPILER)
|
||||
set(CMAKE_CXX_COMPILER "iccarm")
|
||||
endif()
|
||||
|
||||
if (NOT DEFINED CMAKE_ASM_COMPILER)
|
||||
set(CMAKE_ASM_COMPILER "iasmarm")
|
||||
endif()
|
||||
|
||||
set(CMAKE_SIZE "size" CACHE FILEPATH "")
|
||||
set(CMAKE_OBJCOPY "ielftool" CACHE FILEPATH "")
|
||||
set(CMAKE_OBJDUMP "iefdumparm" CACHE FILEPATH "")
|
||||
|
||||
include(${CMAKE_CURRENT_LIST_DIR}/common.cmake)
|
||||
Some files were not shown because too many files have changed in this diff Show More
Loading…
x
Reference in New Issue
Block a user