mirror of
https://github.com/avem-labs/Avem.git
synced 2023-09-01 15:18:49 +08:00
Avem 🐦

[UAV] - [STM32F103] - 6 Axes sensor MPU6050 - Quaternion & Euler Angles Compute - PID Controller
Software
:octocat:but0n/MPU6050_stm32
#Hardware
3D Moudle
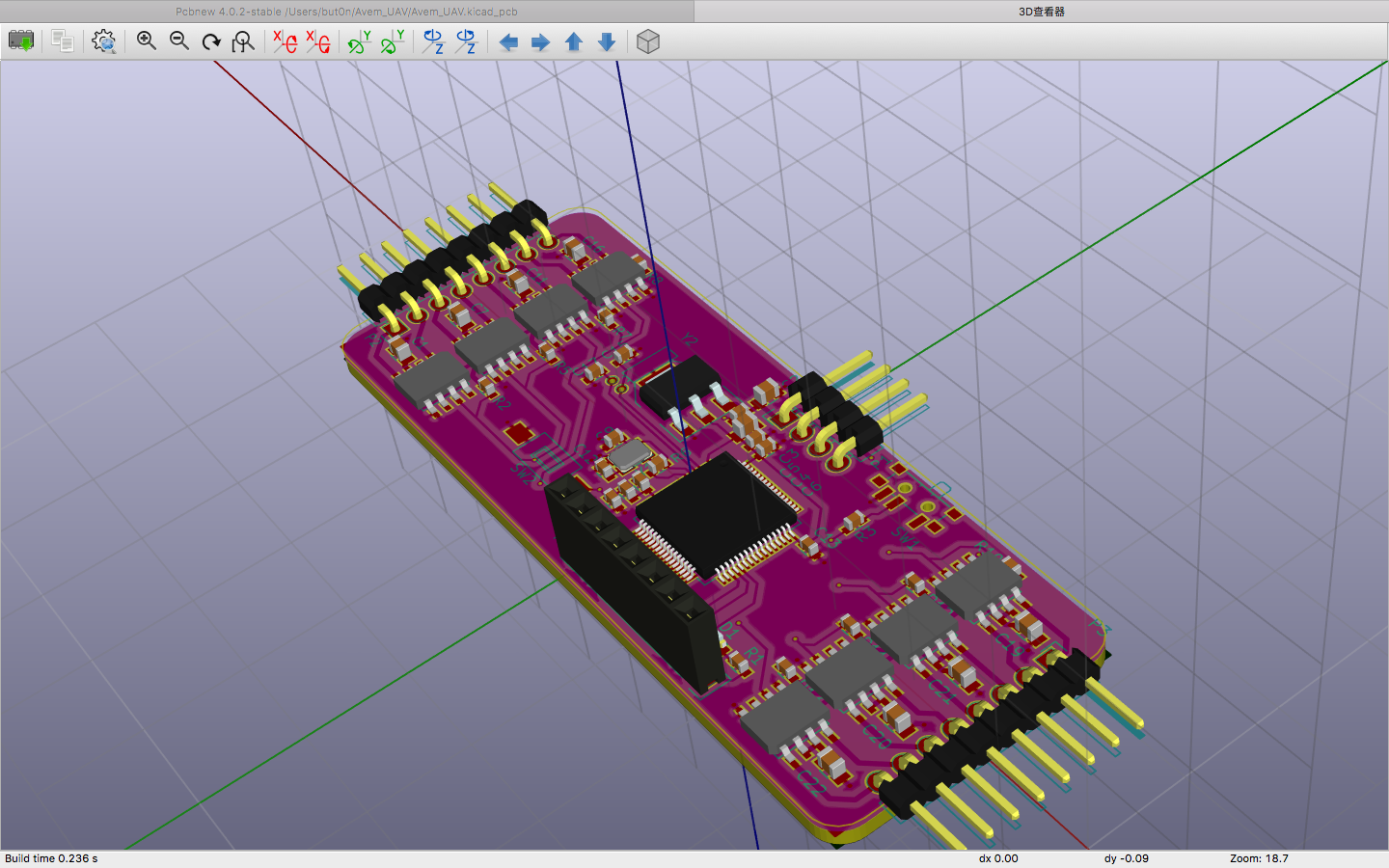
PCB Layout

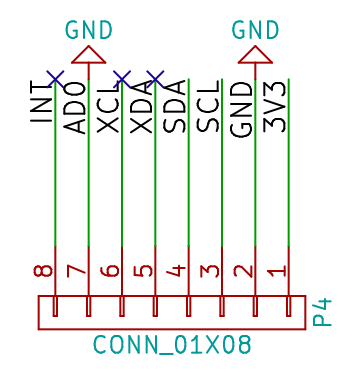
Schematic
Microcontroller -- STM32F103

3.3v Power supply (DC2DC)

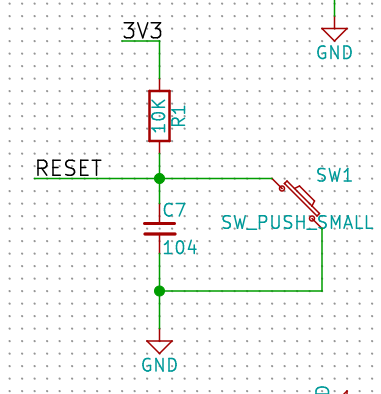
RESET
OSC

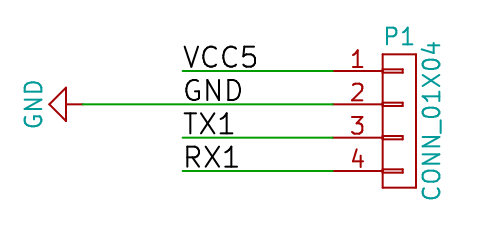
USART In-System Programming
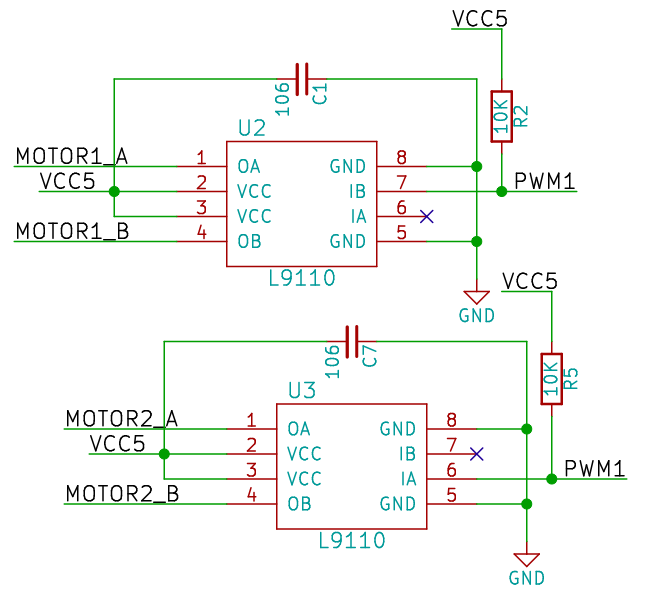
Motor driver
MPU6050
MOTORS
