mirror of
https://github.com/avem-labs/Avem.git
synced 2023-09-01 15:18:49 +08:00
1.2 KiB
1.2 KiB
Avem 🐦

[UAV] - [STM32F103] - 6 Axes sensor MPU6050 - Quaternion & Euler Angles Compute - PID Controller
Todolist
- Software I2C
- Init MPU6050
- Get 3 axes
Gryoand 3 axesAcceldata from MPU6050 - Cumpute Quaternion and Euler Angles
- PWM output
- Driving motors with L9110S
- PID Control
- Schematic
- PCB Layout (Now I'm watting for PCB)
- 使用PWM外接商品电调驱动无刷电机
- Wi-Fi(
ESP8266) - PCB Test
- PID debug
- Design frame
- GPS
- 3D print or CNC cut
- ... ...
- Wi-Fi(
Software
:octocat:but0n/MPU6050_stm32
#Hardware
3D Moudle


PCB Layout

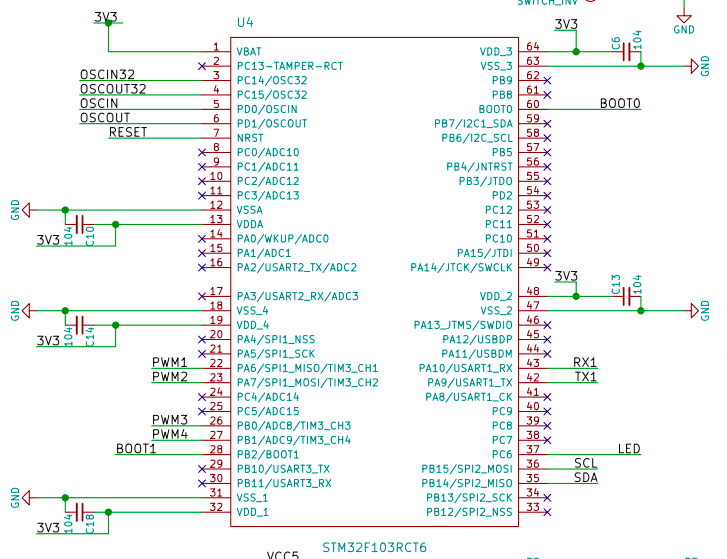
Schematic
Microcontroller -- STM32F103
3.3v Power supply (DC2DC)

RESET

OSC

USART In-System Programming

Motor driver

MPU6050

MOTORS 4-CHANNEL LEFT & 4-CHANNEL RIGHT
